

Attitude correction control system and method of a four-rotor aircraft
A quadrotor aircraft and control system technology, applied in attitude control, control/adjustment system, non-electric variable control and other directions, can solve the problems of external force interference, unstable flight attitude of the quadrotor aircraft, etc., to achieve precise control and loss of loss. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The detailed features and advantages of the present invention are described in detail below in the embodiments, the content of which is sufficient for any person skilled in the art to understand the technical content of the present invention and implement it accordingly, and according to the contents disclosed in this specification, claims and accompanying drawings, The related objects and advantages of the present invention can be easily understood by anyone skilled in the art. The following examples are to further describe the present invention in detail, but not to limit the scope of the present invention in any way.
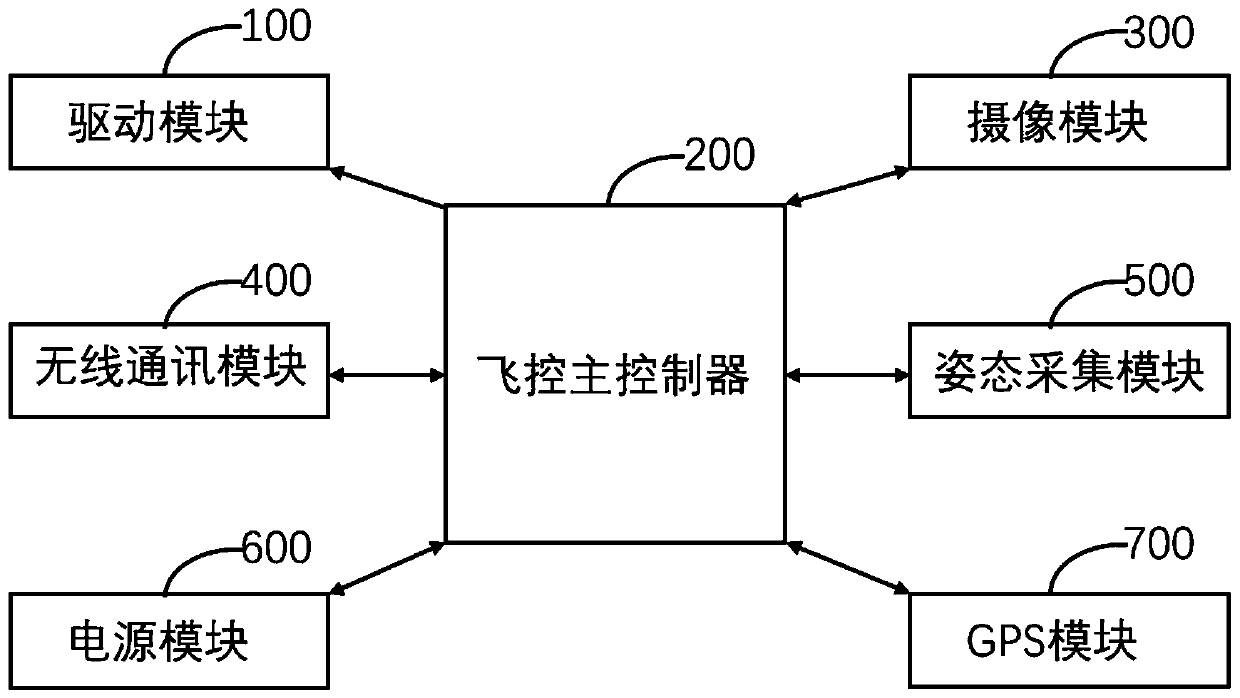
[0026] refer to figure 1 , figure 1 It is a structural block diagram of an embodiment of the drone of the present invention.
[0027] Such as figure 1As shown, the drone of the present invention includes a drive module 100, a flight control main controller 200, a camera module 300, a wireless communication module 400, an attitude acquisition module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More