Line feature visual odometer method combining depth map inference
A visual odometry, line feature technology, applied in computing, image enhancement, image analysis, etc., can solve problems such as depth loss, and achieve the effect of improving accuracy, reliability, and fitting reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
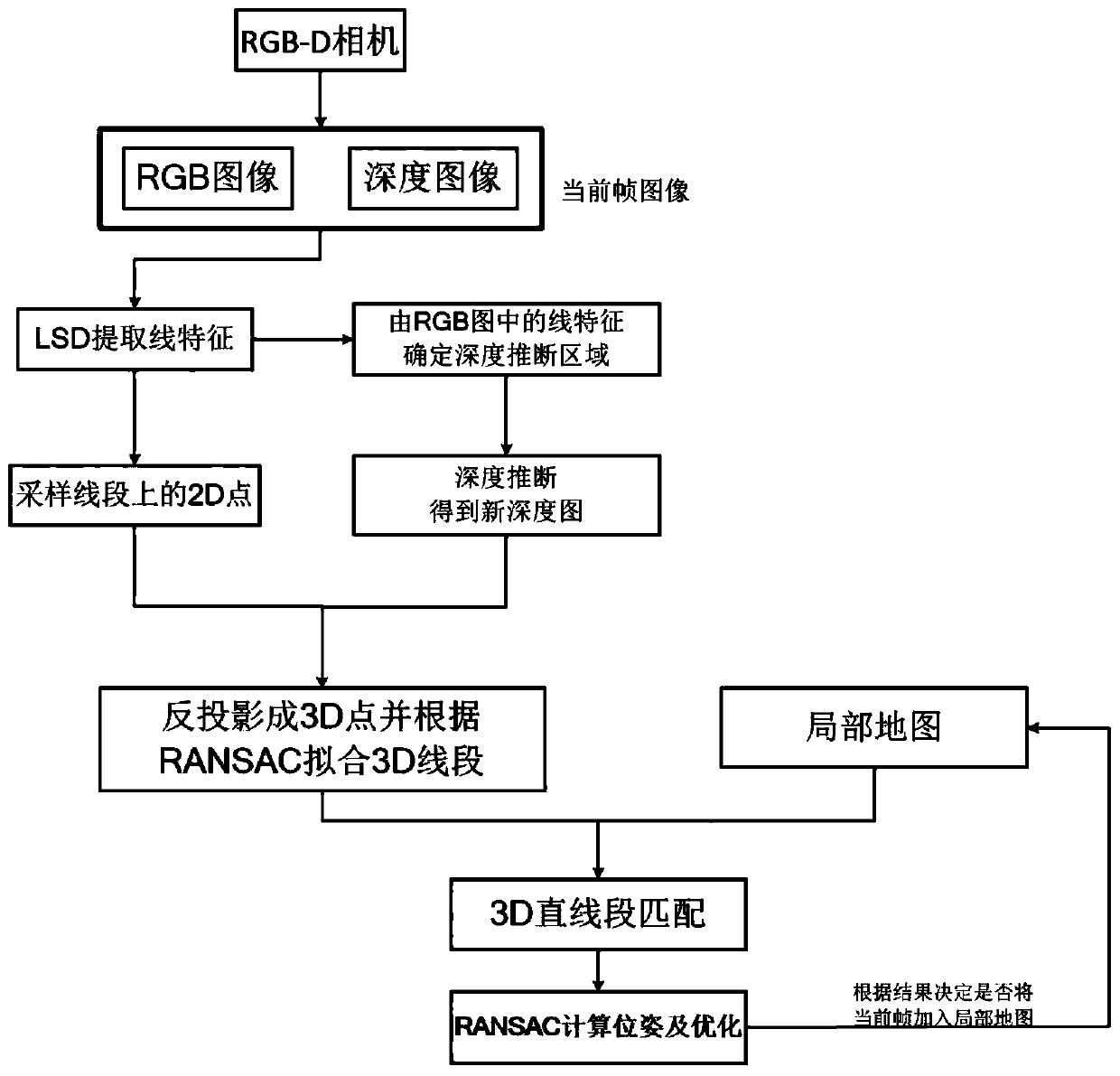
[0033] A visual odometer with line features inferred from depth maps,
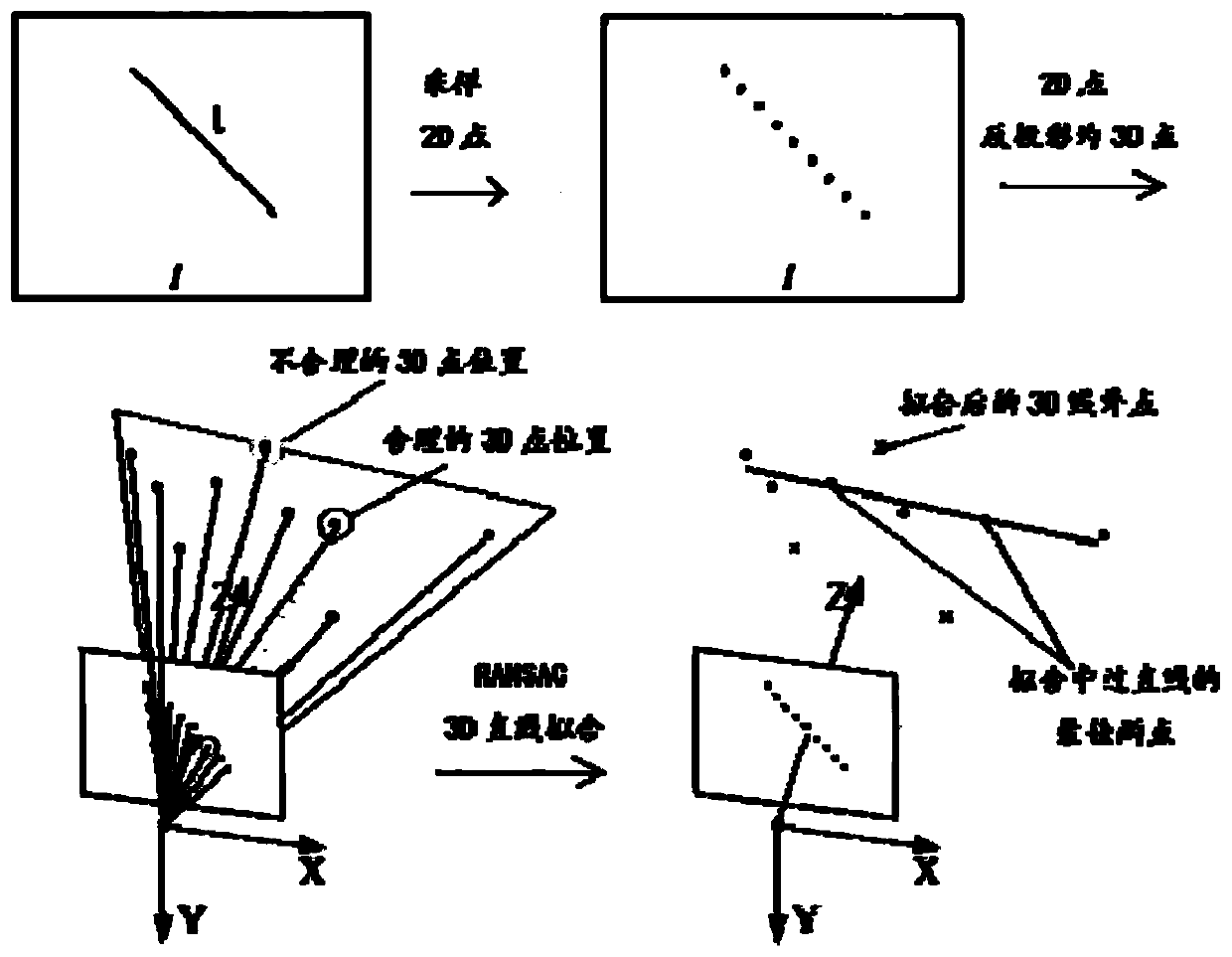
[0034] In order to deal with the problem of insufficient point features in the lack of point features, which leads to the inability to estimate the camera pose, and to make full use of the line structure information in the environment, a RGB-D (RGB-Depth map) visual odometer using line features is proposed, but generally The depth camera will produce the problem of depth loss, which is represented by the gray value of 0 (pure black) area in the depth map. This defect will cause the sampling point on the 2D line to be unable to back-project the sampling point to 3D point, and thus cannot be simulated. Combining 3D line segments may reduce the problem of fitting reliability, so the visual odometry of the line feature combines a deep inference method.
[0035] Step 1: Use a depth camer...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap