

Bat algorithm-based control parameter self-tuning method for AC servo speed regulation system
A control parameter, AC servo technology, applied in control/regulation systems, adaptive control, general control systems, etc., can solve the cumbersome and difficult process, the rise time that characterizes the response performance of the system, the overshoot conflict that characterizes the stability of the system, Unable to take into account various performance indicators and other issues, to achieve the effect of flexible selection, good adaptability, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
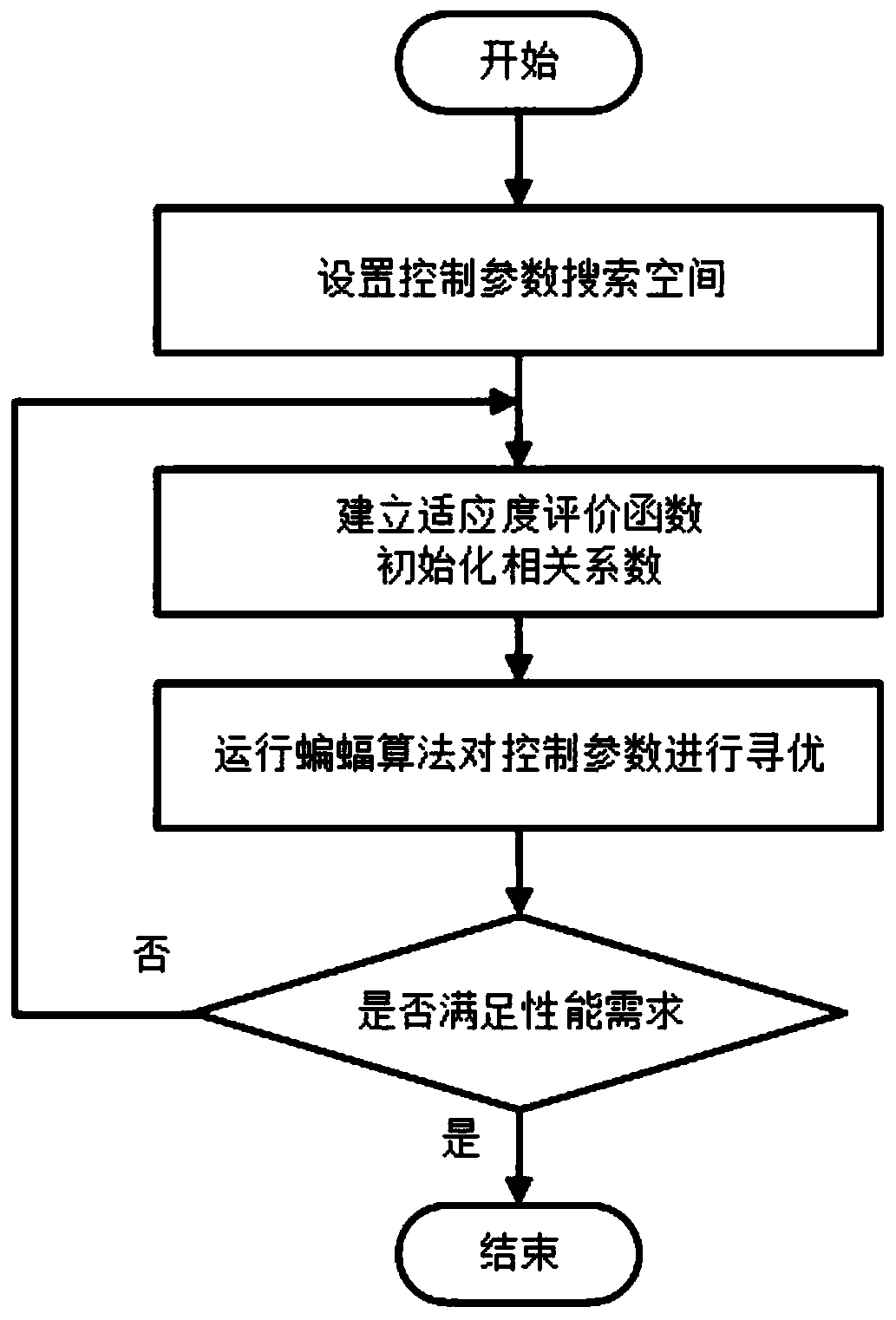
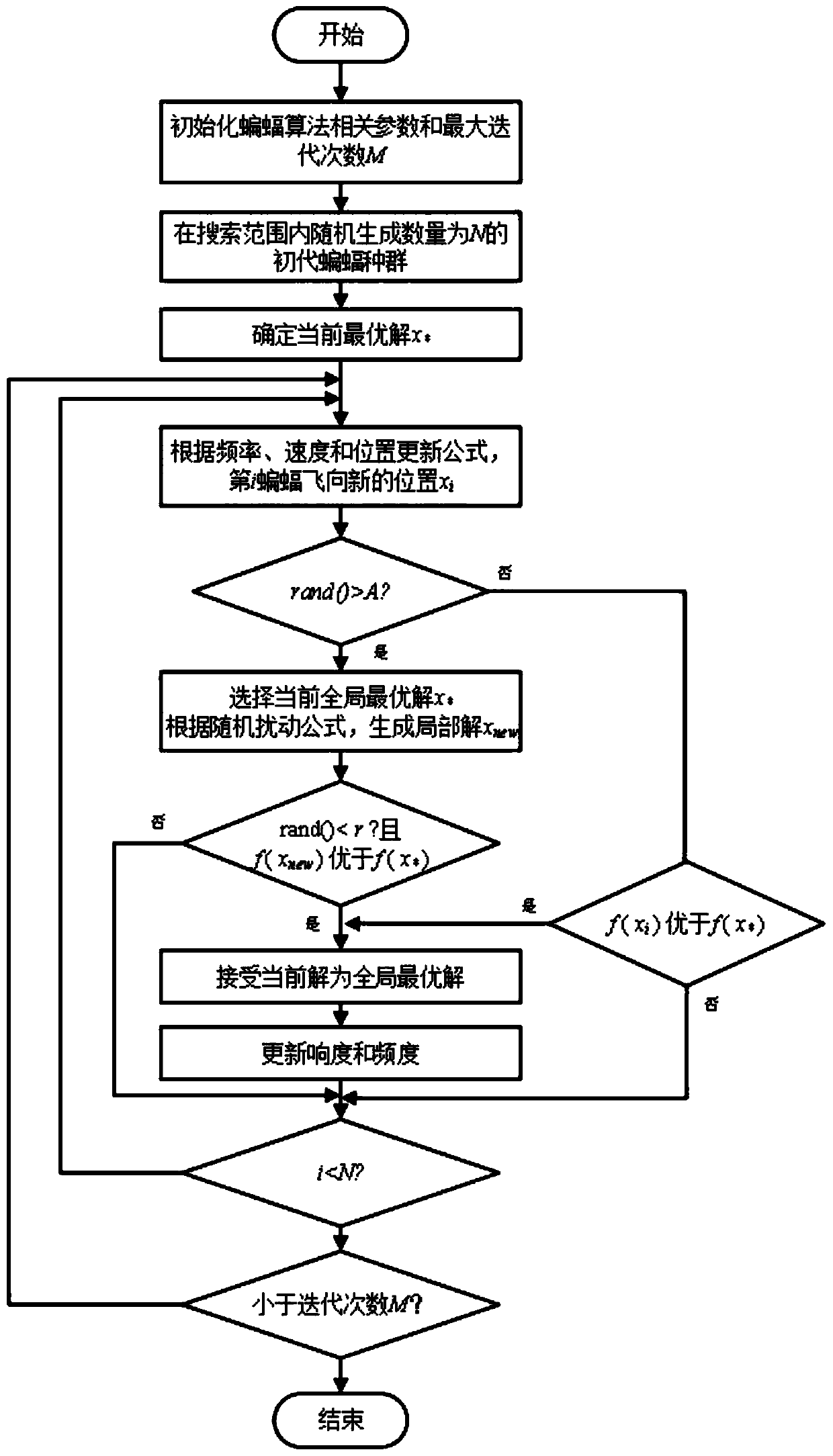
[0060] A self-tuning method for control parameters of an AC servo speed control system based on the bat algorithm, which is mainly divided into the following steps. The algorithm flow chart is as follows: figure 1 shown.
[0061] Step 1: Set the control parameter search space.
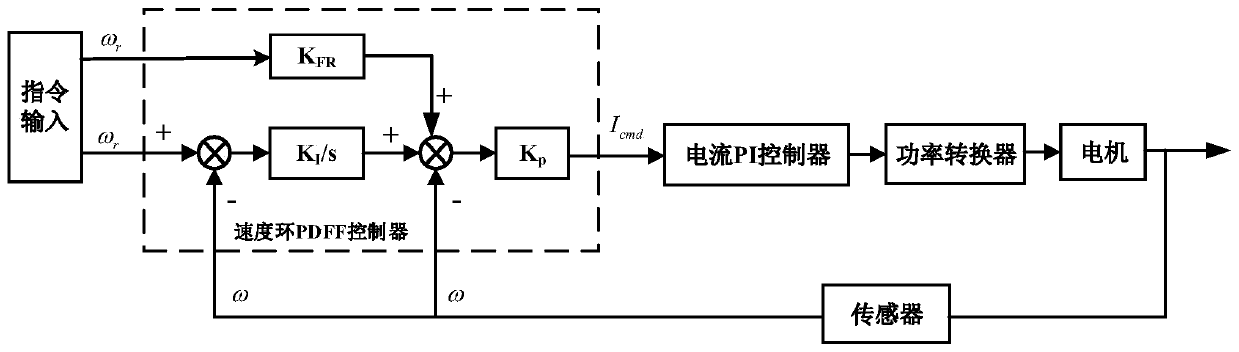
[0062] In industrial applications, the AC servo speed control system adopts such as figure 2 In the double closed-loop cascaded control structure shown, the inner layer is the current loop, including the current PI controller, power converter, motor and sensor, etc., and the outer layer is the speed loop, including the speed regulator and the internal current loop module. The function of the internal current loop is mainly to quickly respond to the current command signal and drive the motor to run through the power converter, and its parameters are mainly affected by the electromagnetic parameters of each component. Therefore, the current loop controller is generally adjusted and determined by the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More