

Image calibration method based on RGBD depth camera device
An image calibration and depth camera technology, applied in the field of image processing, can solve the problems of low practicability, need for many auxiliary devices, small viewing angle, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
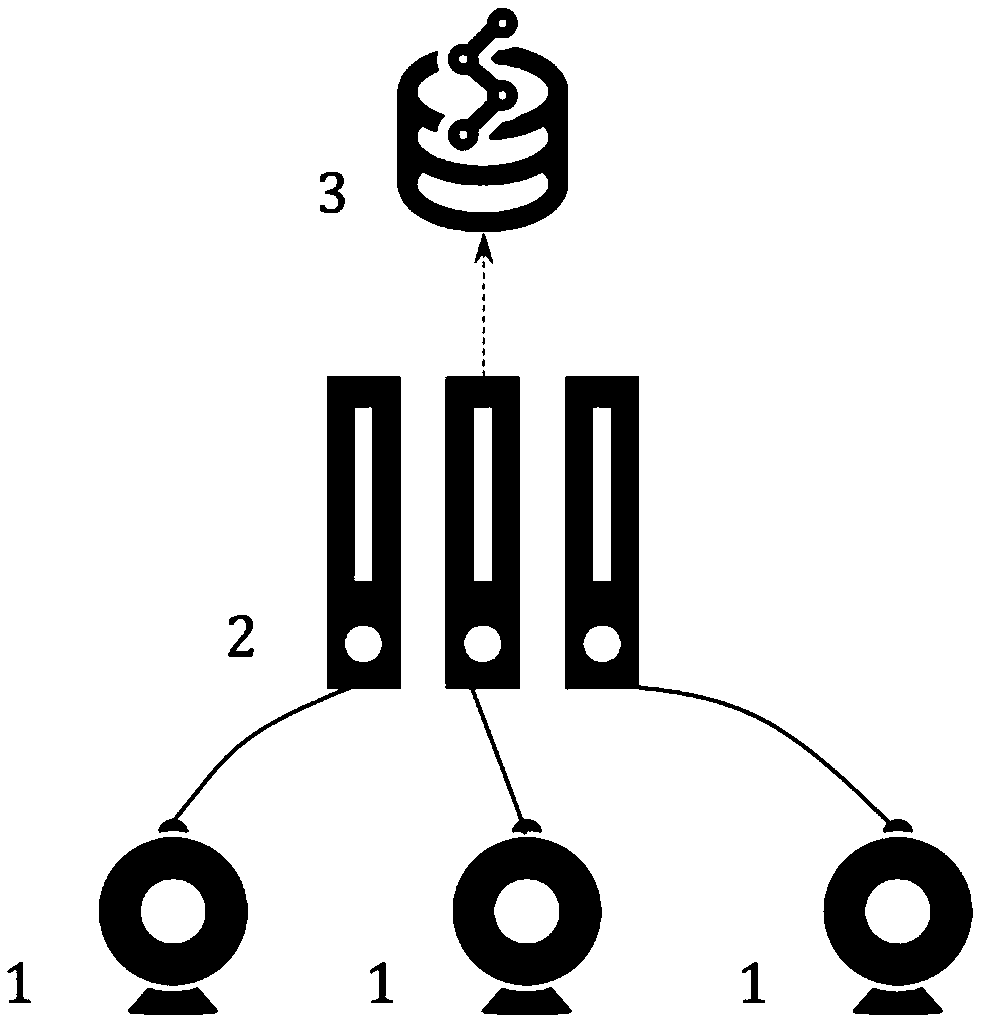
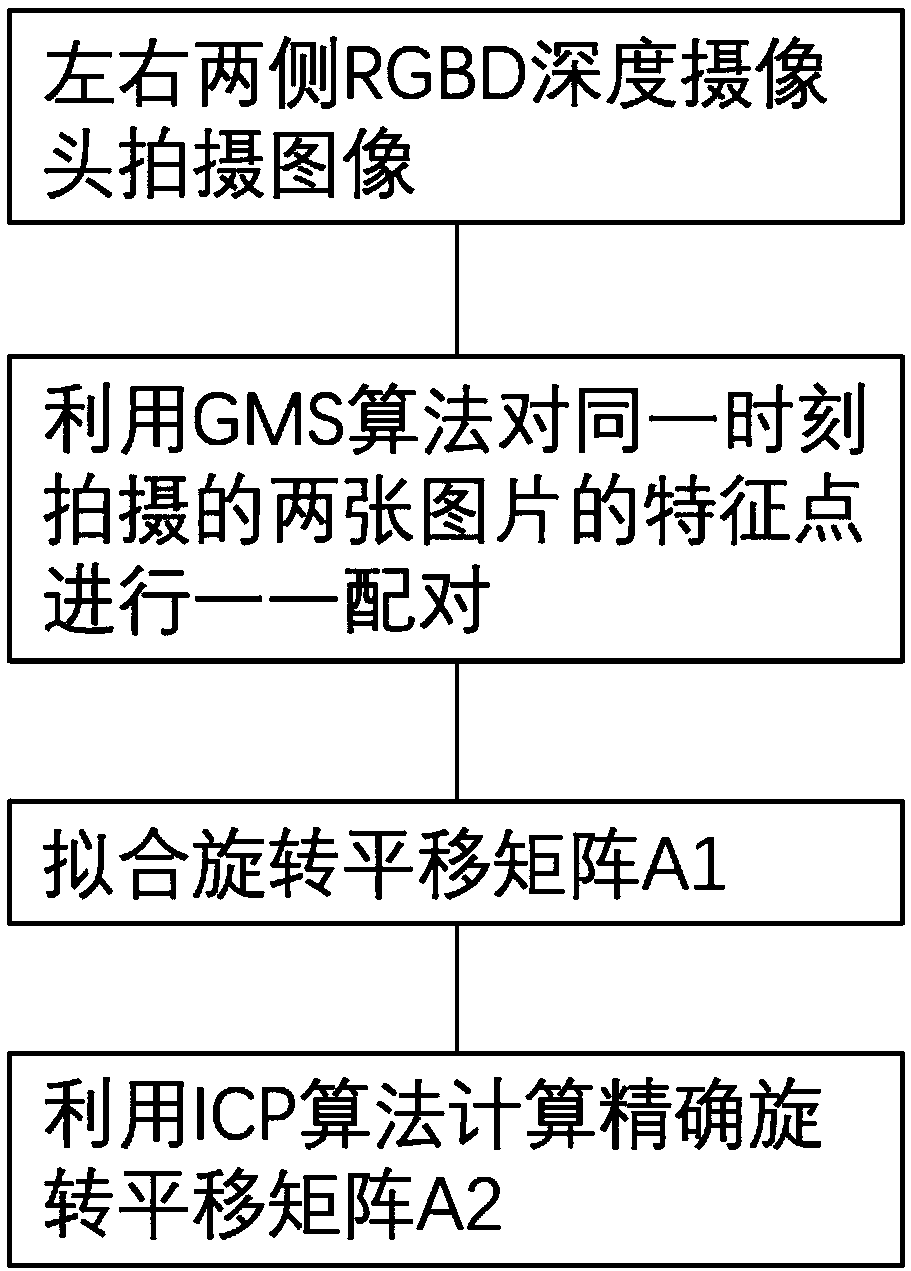
[0045] In an embodiment of the present invention, two RGBD depth camera devices are used for image acquisition. In this embodiment, the method for calibrating the images simultaneously collected by the two RGBD depth camera devices is as follows: figure 2 Shown, including:
[0046] S1: Collect images taken by two RGBD depth camera devices, the images include color images and depth images, the left camera device is used as the target camera device, the original point (X1, Y1, Z1) and color images are collected, and the right camera is taken The device is used as a calibrated camera device to collect original points (X2, Y2, Z2) and color images.
[0047] S2: Select the color pictures taken by the target camera device and the calibration camera device at the same time, use the (Oriented Fase and Rotated BRIEF) algorithm in the OpenCV computational vision library to extract the feature points of the two pictures respectively, and use the GMS algorithm to perform one One pairing work...
Embodiment 3
[0075] In a specific embodiment of the present invention, in order to increase the calculation speed, during the ICP registration process, three levels of down-sampling can be performed on the initial point cloud and the target point cloud to obtain four sets of corresponding point clouds, which are respectively the initial scale points Cloud (512*424), quarter-scale point cloud (256*212), one-sixteenth-scale point cloud (128*106), and sixty-fourth-scale point cloud (64*53). Then, the corresponding point cloud of one-64th scale is registered to obtain a rough registration transformation matrix, and this transformation is applied to the one-sixteenth of the initial point cloud. Then, repeat the previous step for the corresponding point cloud of the one-sixteenth scale. The same applies to the point cloud of the quarter-scale and the initial point cloud, and finally an accurate transformation matrix is obtained. Through the above improvements, the present invention significantl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More