

Feature line fused laser point cloud and analog image registration method
A technology of laser point cloud and simulated image, applied in image enhancement, image analysis, image data processing, etc. Accurate selection and other issues to achieve the effect of universality and portability, broad market application prospects, and huge potential for promotion and application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0117] The technical scheme of the registration method of laser point cloud and simulated image provided by the present invention will be further described in conjunction with the accompanying drawings, so that those skilled in the art can better understand the present invention and be able to implement it.
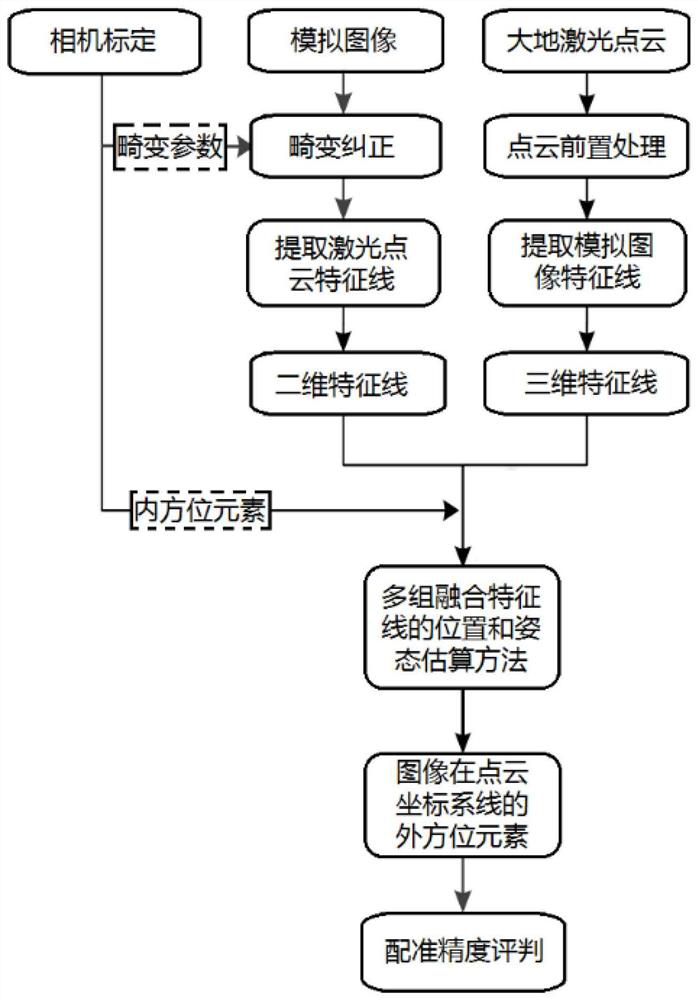
[0118] The registration method of laser point cloud and simulated image with feature line fusion provided by the present invention establishes a direct transformation model between image feature lines and point cloud feature lines, which has no model error, no initial value of external orientation elements, and only a small amount Registration primitives and other advantages, and fast calculation speed, meet the registration requirements of simulated images and ground laser point cloud data. The 2D and 3D fusion registration method based on feature lines includes camera imaging model and camera calibration, and the position and attitude estimation method of multiple sets o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More