

Flexible control method and flexible control system for arm strength of robot
A robot arm and control method technology, applied in passive exercise equipment, physical therapy and other directions, can solve problems such as inability to adapt to patients, secondary injury to patients, and inability to interact with humans and machines. The effect of rehabilitation training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
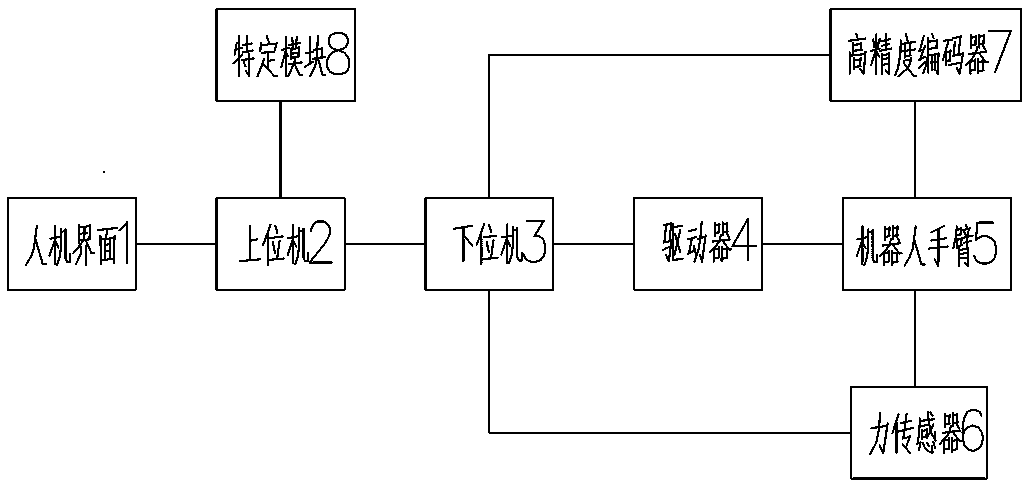
[0029] This embodiment is a flexible control system for the strength of a robot arm, the control system is used to control the robot arm, and the robot arm can assist the patient's affected limb to complete the rehabilitation training action. In this example, the robot arm is a two-axis manipulator, which can realize the movement in two dimensions of XY. Corresponding to the two dimensions, there are motors and transmission mechanisms that drive the arm to move in the corresponding dimension. The motor adopts a servo motor, and the two servo motors have an orthogonal structure. No coupling.
[0030] like figure 1 As shown, the control system in this embodiment includes a man-machine interface, an upper computer, a lower computer, a driver, a robot arm, a force sensor, a high-precision encoder and specific modules.
[0031] In this example, the human-computer interface is used for human-computer interaction, and a touch screen is used for convenient and friendly human-computer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More