

Wall-climbing robot
A wall-climbing robot and a pair of technologies, which are applied in the field of wall-climbing robots, can solve the hidden dangers of wall-climbing robots and affect the wall-climbing stability of wall-climbing robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to enable those skilled in the art to better understand the technical solution of the present invention, the application will be described in detail below in conjunction with the accompanying drawings. The description in this part is only exemplary and explanatory, and should not have any limiting effect on the protection scope of the application. .
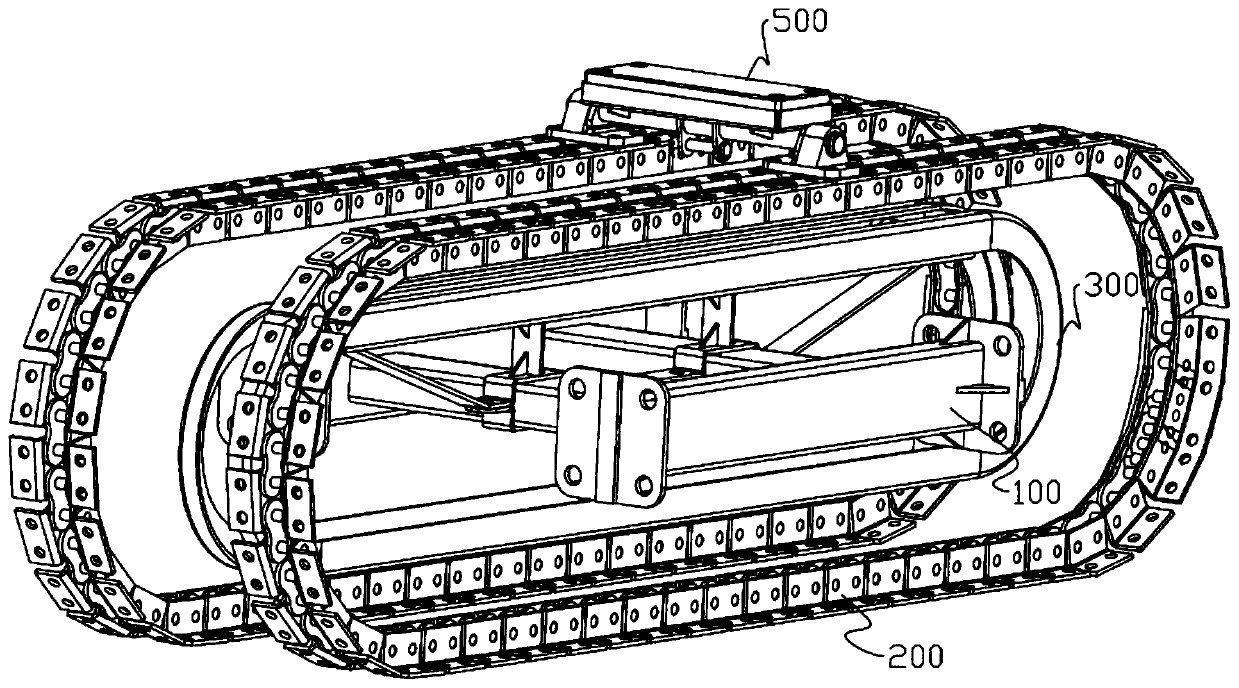
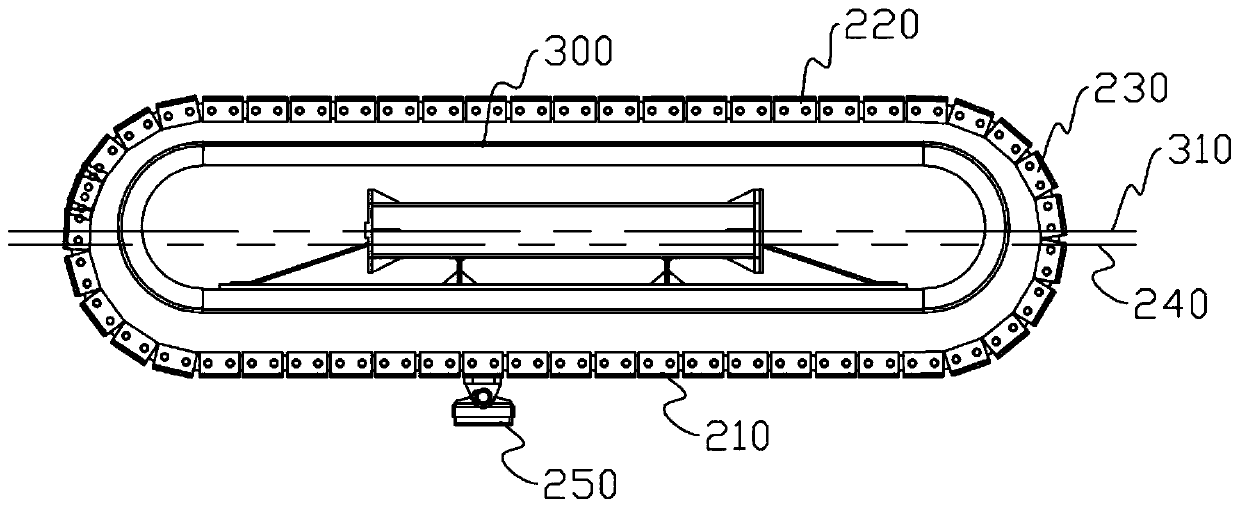
[0019] Such as figure 1 , figure 2 Shown is a schematic diagram of the first embodiment of the present application, including: a support frame 100, the support frame 100 is provided with a drive mechanism, the support frame 100 is provided with a pair of caterpillar belts 200, and the drive mechanism drives a pair of The crawler belts 200 move synchronously, and the section shape of the crawler belts 200 is configured as a racetrack. Preferably, the crawler belt 200 is set as a chain. In this embodiment, a pair of driving wheels drives a pair of chains to move synchronously. Since the driving wheels are fixedly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More