

High-precision heavy-load carrying operation device
A kind of operation equipment and high-precision technology, which is applied in the direction of transportation and packaging, load suspension components, running mechanism, etc., can solve the problems of complex manufacturing, installation process, high cost and rising cost, and achieve the effect of wide operation area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
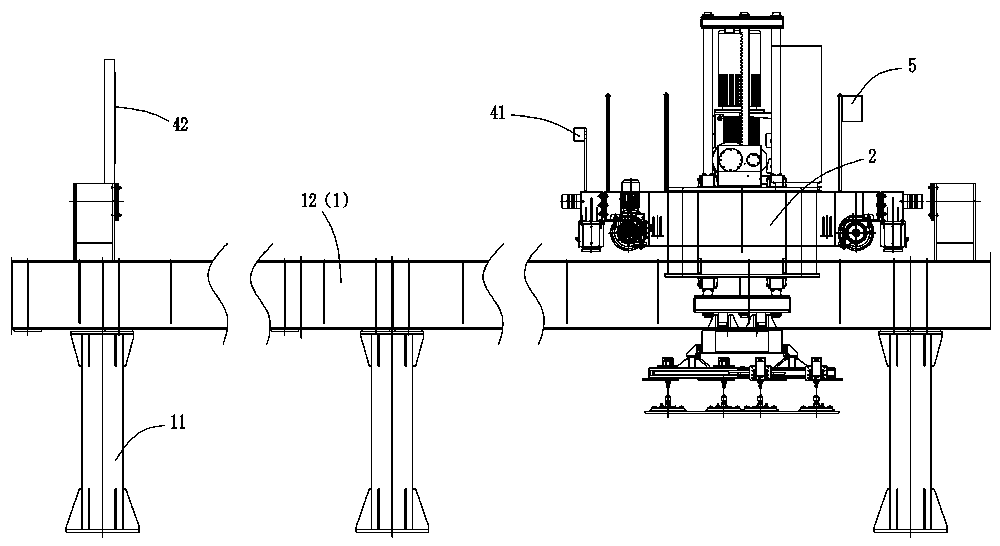
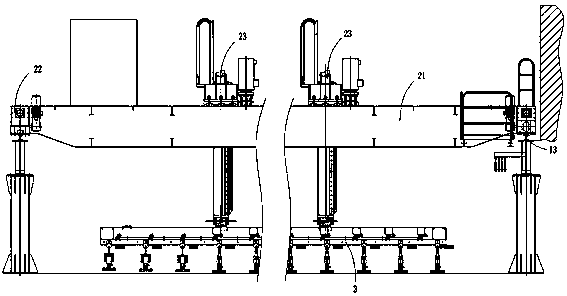
[0028] Such as figure 1 with figure 2 As shown, a high-precision heavy-duty handling operation equipment is provided, which includes a frame part 1, a moving part 2, a clamp part 3 and an electrical control system. The frame part includes a plurality of columns 11 arranged on both sides of the moving part. It can be extended and arranged according to the transportation distance. A girder 12 is erected between the adjacent columns 11 on each side to carry the load of the moving part. The girders are connected by bolts, and the rails 13 are laid on the girders; The bridge frame 21 between the side rails 13, the bridge frame 21 is driven by the first traveling mechanism 22 to walk along the track 13 (the track direction is hereinafter referred to as the X-axis direction); A lifting mechanism 23 that moves straight (the lifting direction of the lifting mechanism is hereinafter referred to as the Z-axis direction), and the gripper part 3 is connected to the lifting mechanism 23 f...
Embodiment 2
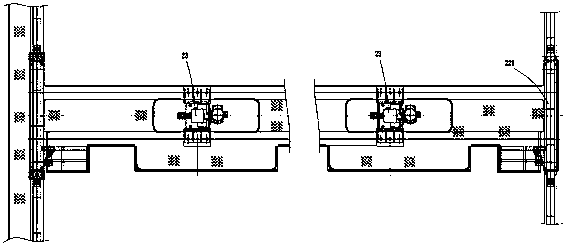
[0038] In this embodiment, on the basis of Embodiment 1, a function is added to enable the lifting mechanism to drive the clamp part to walk in the length direction of the bridge. Specifically, the bridge 21 includes two sub-bridges 211 arranged in parallel and with spacing. Two trolleys 212 are straddled, the lifting mechanism is set on the trolley, the sub-bridge is provided with a walking track 213 along its own length, and the trolley is equipped with a second traveling mechanism to drive the trolley to slide along the running track (this direction is called the Y-axis direction ), in order to realize the movement of the operating equipment in the directions of X, Y, and Z axes, the second traveling mechanism includes a motor 214 and a bridge traveling wheel 215, that is, the walking of the trolley is realized simply by referring to the motor-driven traveling wheel in the prior art , so I won’t make too many records here.
[0039] In this embodiment, each trolley is provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More