Star map identification method for precise tracking telescope
A technology of star map recognition and recognition method, which is applied in the field of star map recognition, can solve problems such as cumulative error, unsuitable large field of view, slow matching speed, etc., and achieve the effects of speeding up, increasing universality, and reducing storage space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0034] Specific implementation mode 1. Combination Figure 1 to Figure 3 Describe this embodiment, a star map recognition method for precision tracking telescopes, including two parts: the first frame recognition method and the continuous frame refresh method.
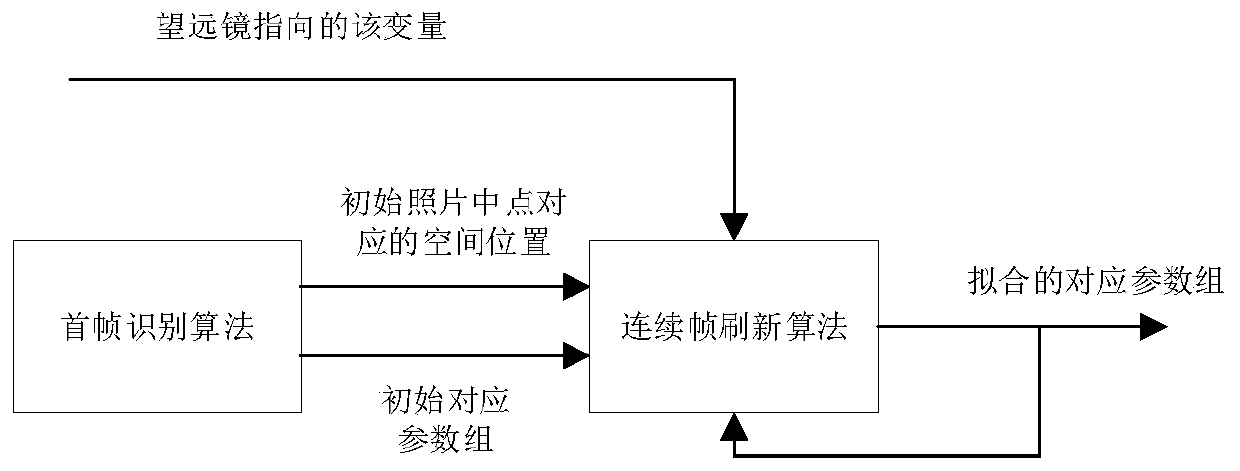
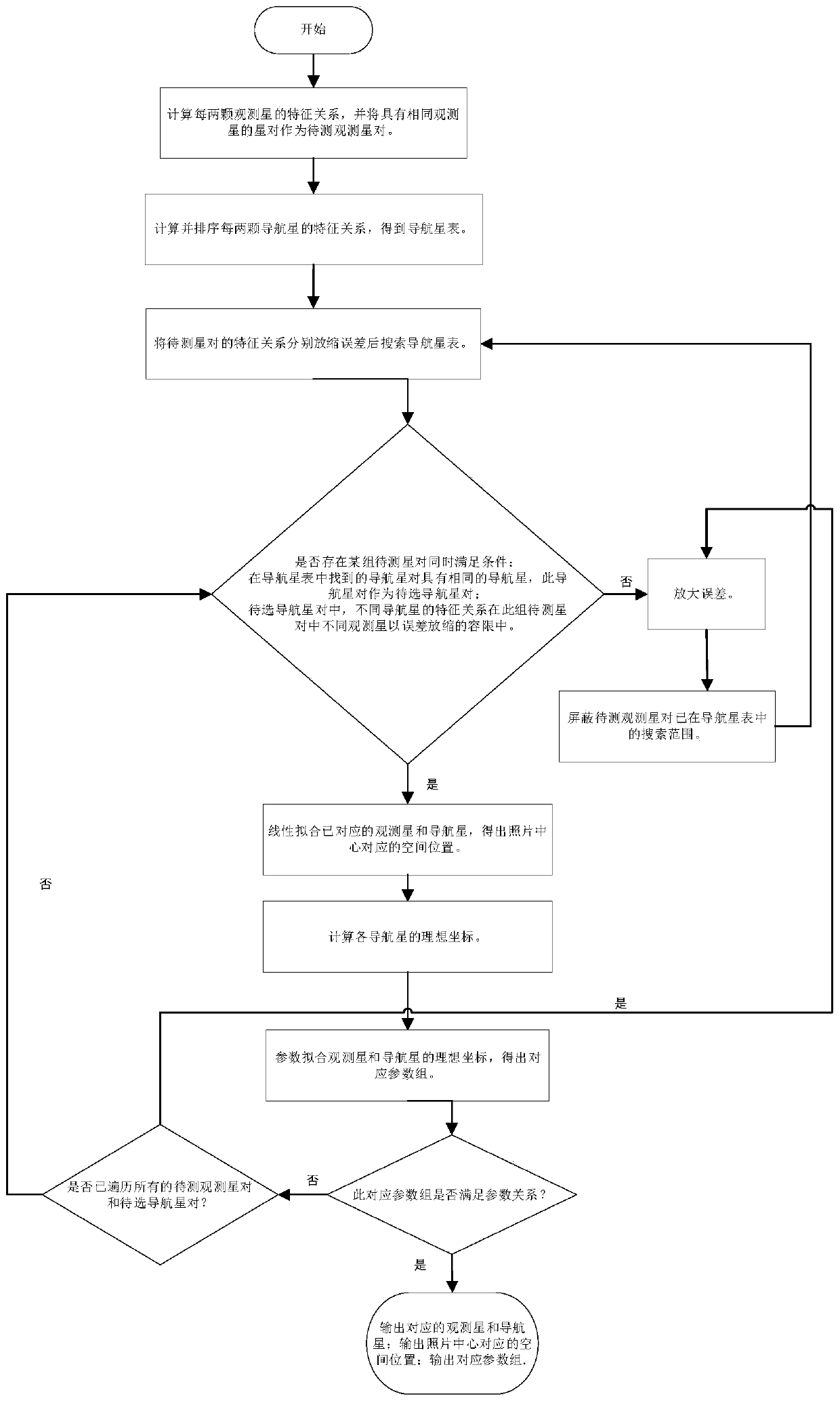
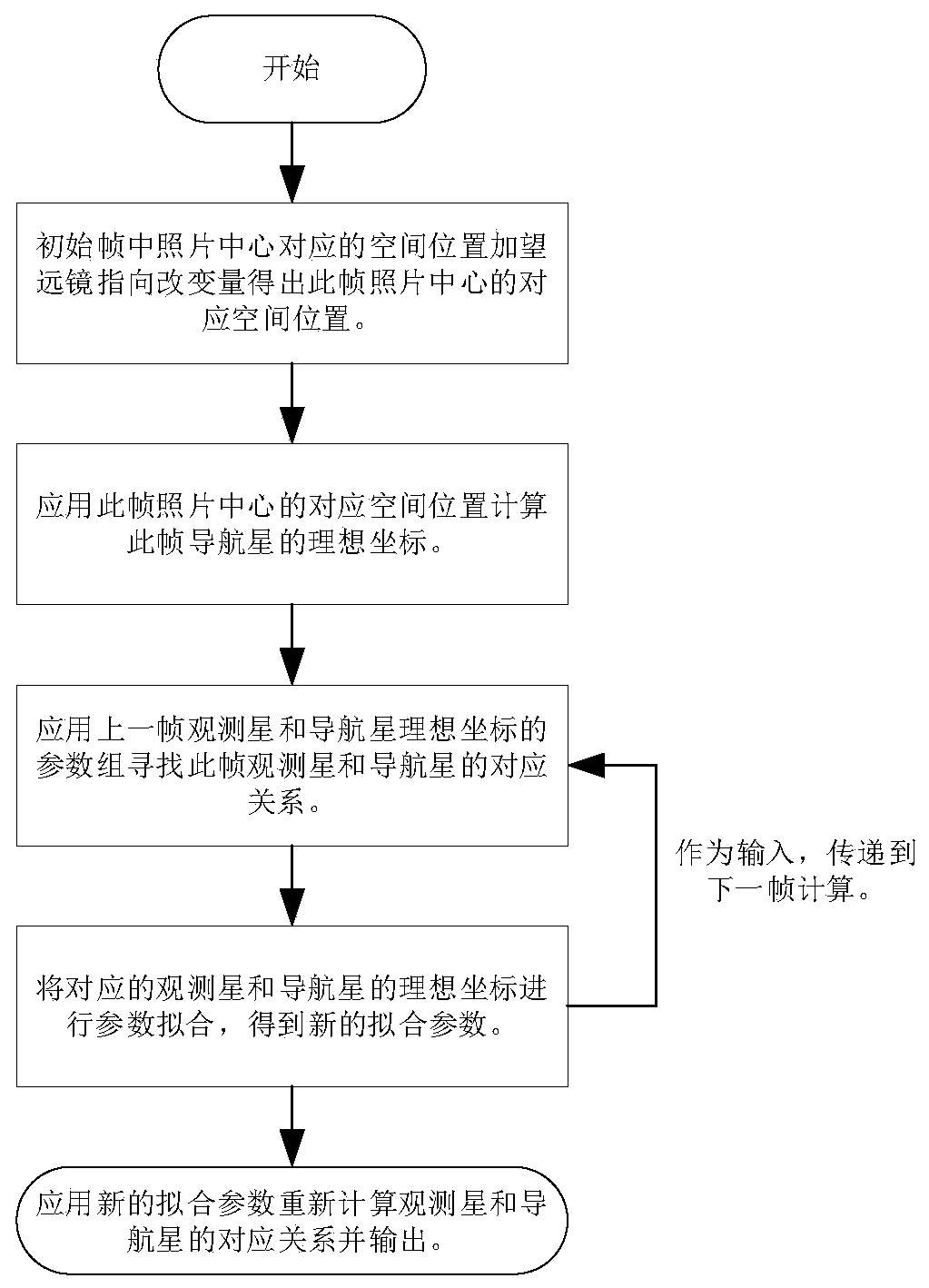
[0035] The spatial position corresponding to the midpoint of the photo obtained by the first frame recognition method and the initial corresponding fitting parameters are used as the input of the continuous frame refresh algorithm. Among them: the position corresponding to the midpoint of the first frame plus the amount of change in each frame of the telescope relative to the position of the first frame is used as a parameter for subsequent calculation of the ideal coordinates of the navigation star; the initial corresponding fitting parameters are used to obtain the first fitting corresponding relationship in the second frame , and then this relationship is fitted and refreshed, and the fitting parameters are output a...
specific Embodiment approach 2
[0076]Specific embodiment two, present embodiment is the embodiment of a kind of star map identification method that is used for precision tracking type telescope described in specific embodiment one:
[0077] Telescope platform: Changchun Satellite Observatory 1.2-m telescope.
[0078] Observation time: April 21, 2019
[0079] The telescope points to the sky area: (Ra: 9.318417h–9.402894h), (Dec: 0.392261°–0.069461°)
[0080] Data composition: a total of 30 frames of data, the number of observation stars per frame: 360-616, the number of navigation stars per frame: 19-27.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com