

Pose-synchronous six-axis industrial robot track smoothing method
An industrial robot and trajectory technology, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of position and attitude geometric shape change, trajectory shape change, unconstrained position and attitude transition error, etc., to improve work efficiency and Mass, avoiding pauses and vibrations, avoiding changing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation. It should be understood that the specific implementation cases described here are only used to explain the present invention, and are not intended to limit the present invention.
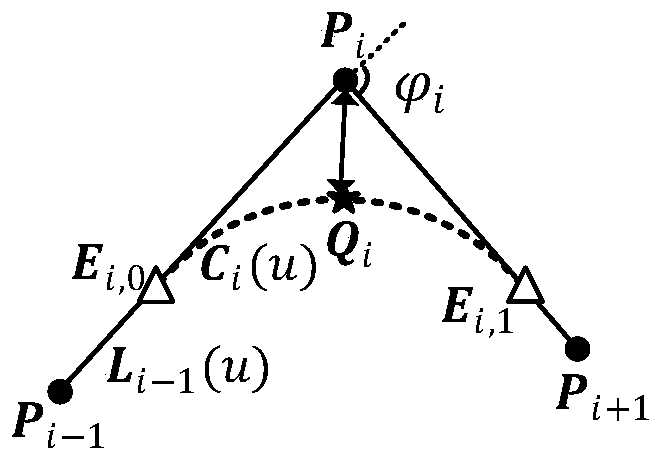
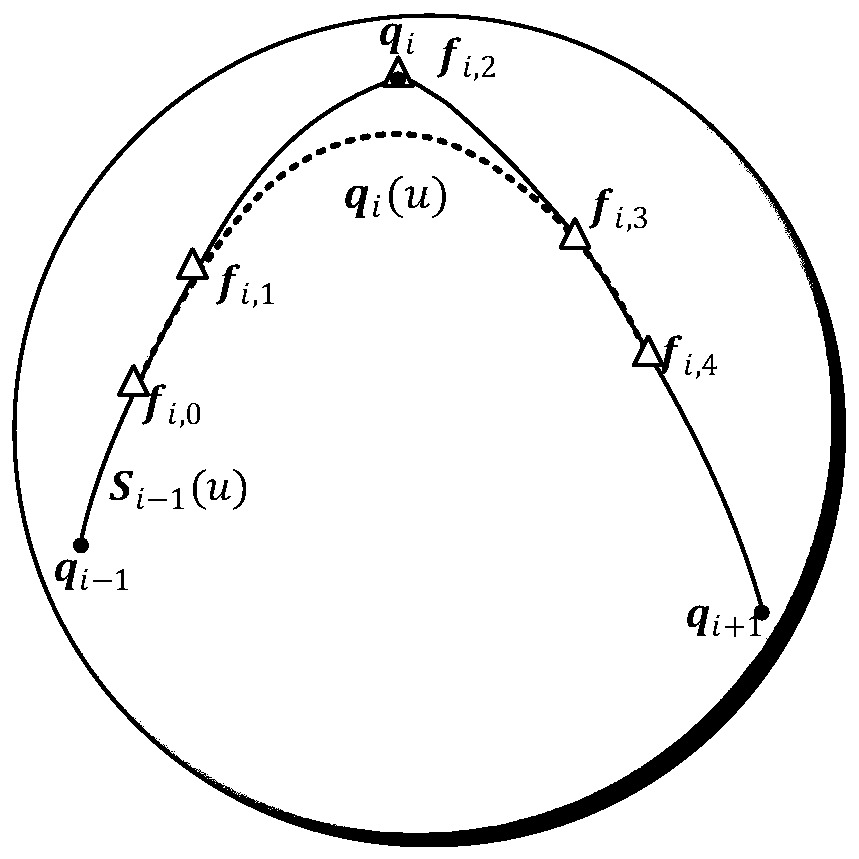
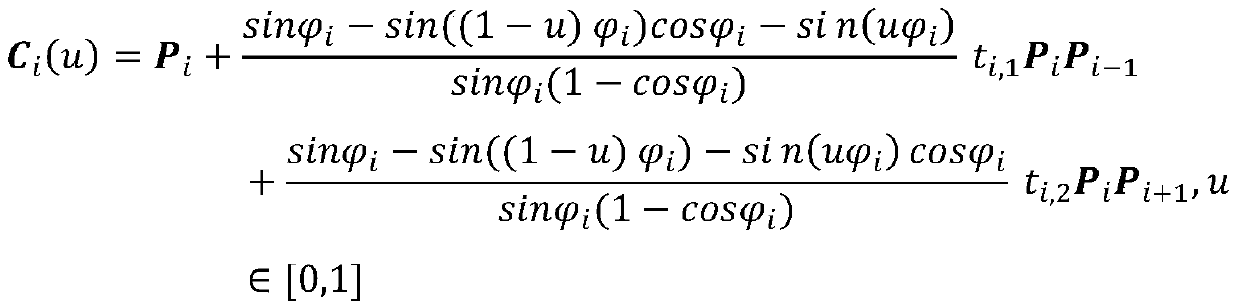
[0041] The present invention is a method for smoothing the trajectory of a six-axis industrial robot with synchronous position and posture, wherein the position trajectory adopts circular arc transition, the attitude trajectory adopts quaternion B-spline transition, and the calculation of the transition trajectory mainly includes two steps: calculating the transition parameters and constructing the transition trajectory. The main steps.
[0042] Step 1. Determine the transition parameters of each position point and attitude point according to transition erro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More