

Horizontal clamping self-adaptive three-finger underactuated robot hand
A robotic hand and underactuated technology, applied in the field of robotics, can solve problems such as complex structure, large mass and volume, and difficult control, and achieve the effects of low manufacturing and maintenance costs, large grasping range, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with the implementations shown in the drawings, but it should be noted that these implementations are not limitations of the present invention, and those of ordinary skill in the art based on the functions, methods, or structures of these implementations All equivalent transformations or substitutions are within the protection scope of the present invention.
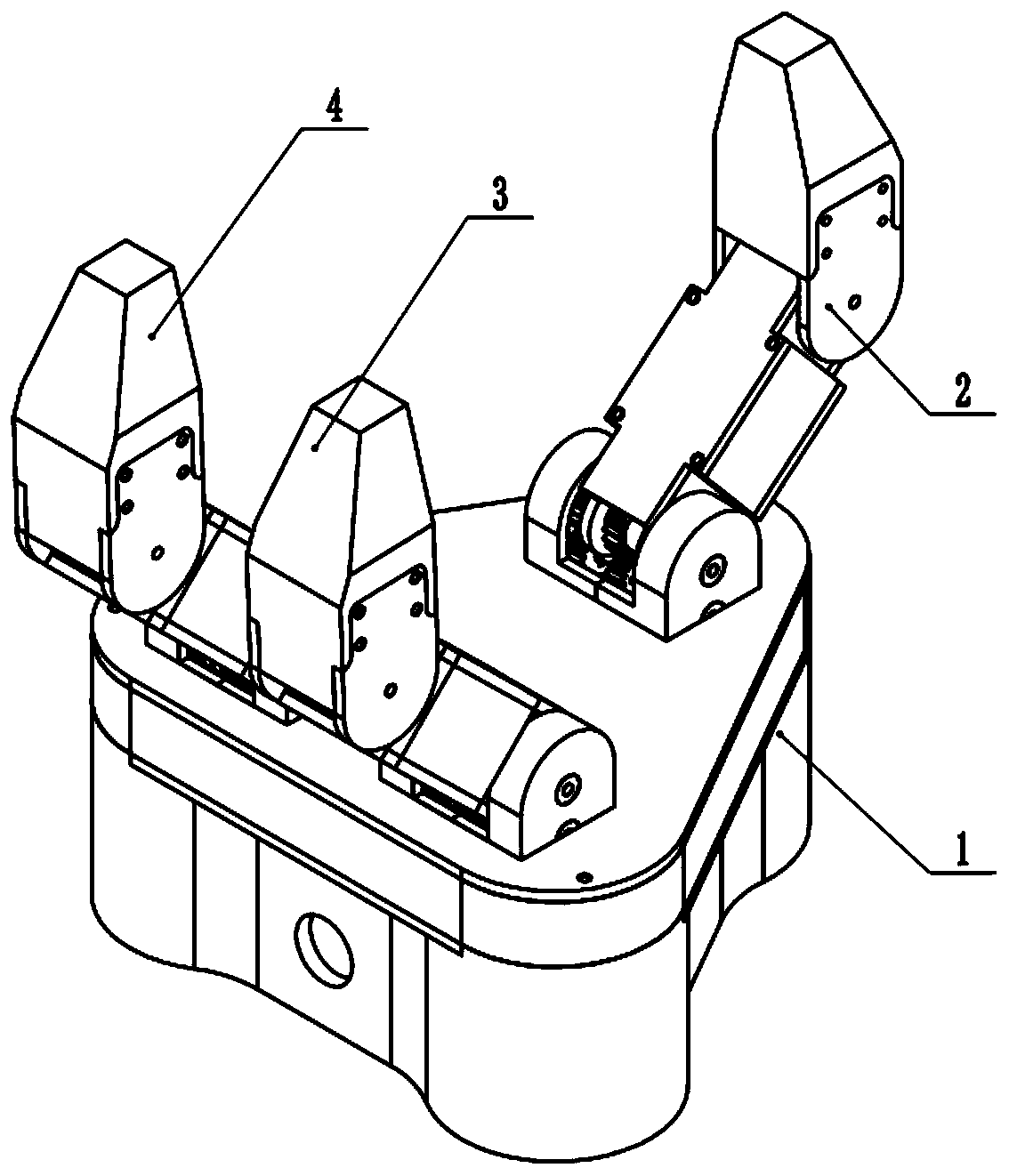
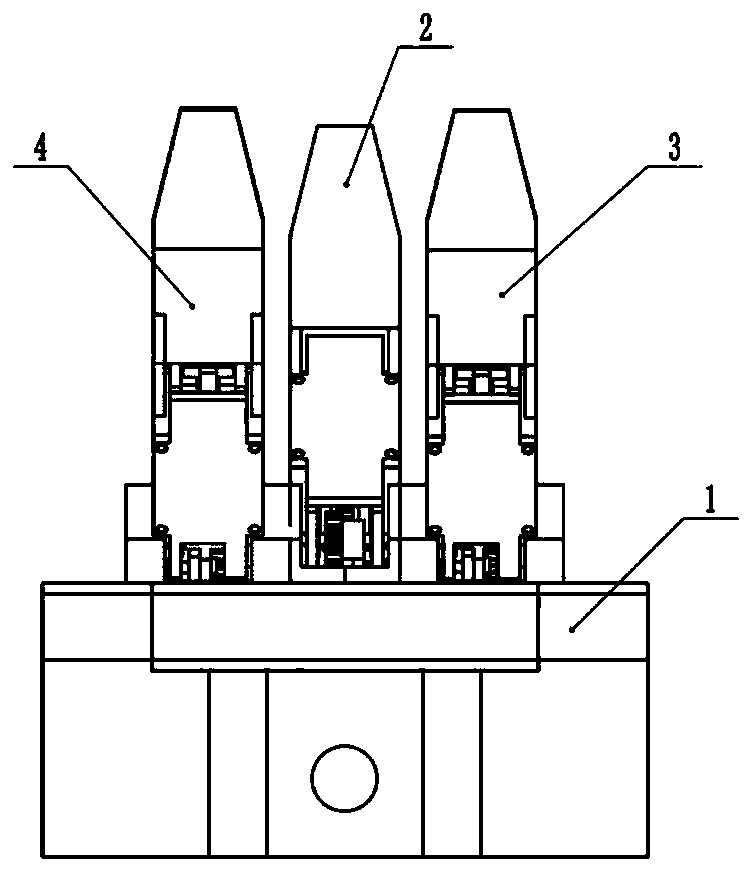
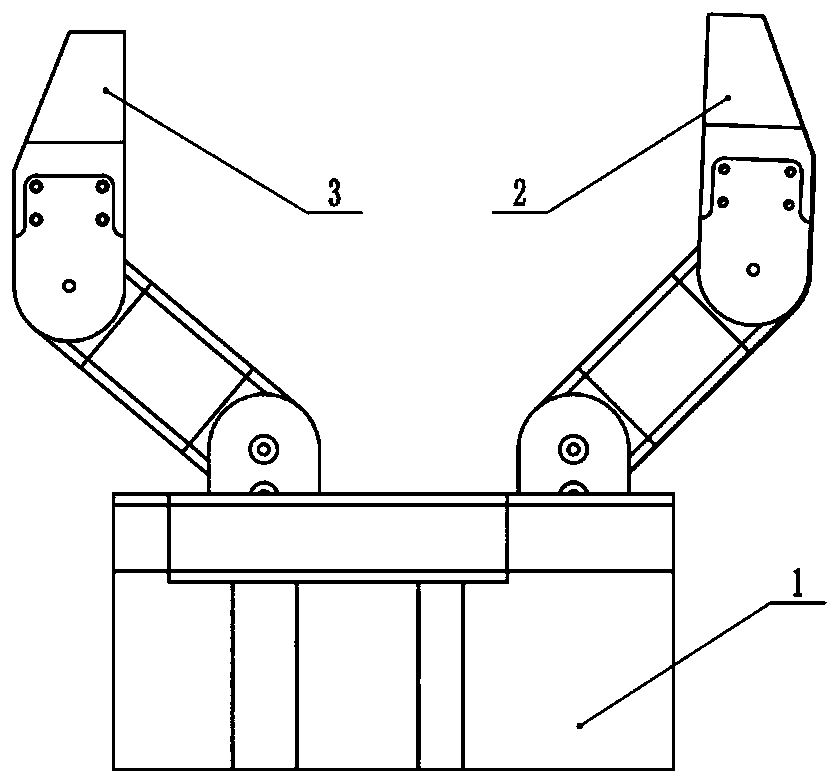
[0040] ginseng Figure 1 to Figure 18 as shown, figure 1 It is the overall three-dimensional appearance diagram of the flat clamp self-adaptive three-finger underactuated robot hand designed by the present invention, figure 2 yes figure 1 Front view of the embodiment shown, image 3 yes figure 1 Right side view of the embodiment shown, Figure 4 yes figure 1 Schematic diagram of the structure of the shown embodiment, Figure 5 yes figure 1 The overall three-dimensional appearance view of the finger of the illustrated embodiment, Figu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More