

Transverse control method and system for automatic driving truck
A technology of lateral control and automatic driving, applied in the general control system, control/regulation system, adaptive control, etc., can solve problems such as difficulty in ensuring stable vehicle control, insufficient robustness of the control system, etc., and improve design efficiency , strengthen the consistency, improve the effect of comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
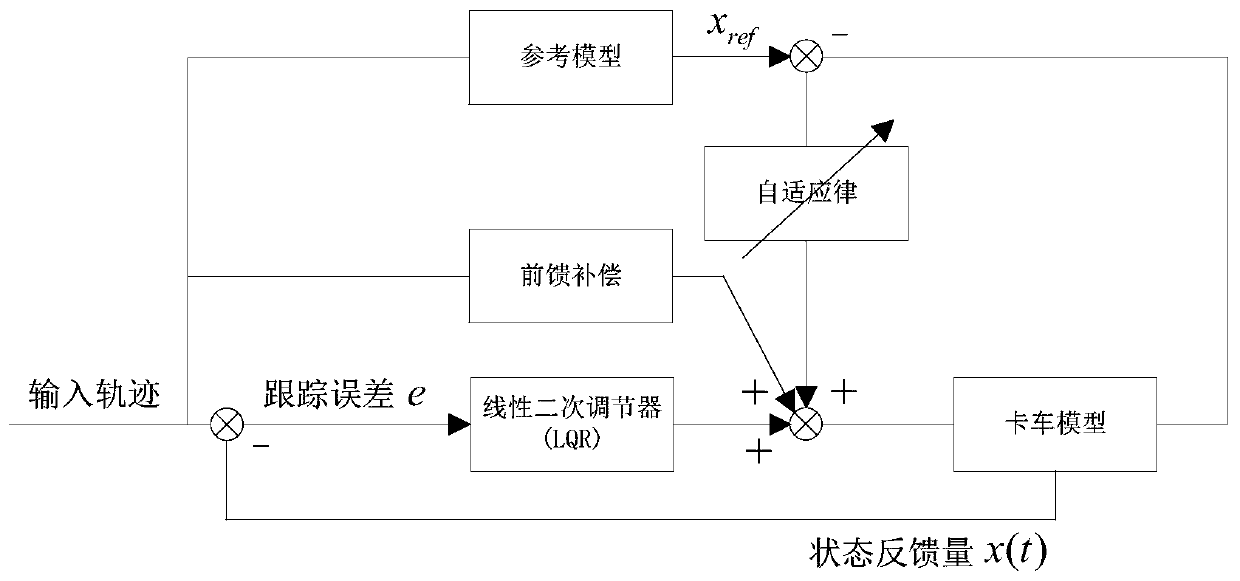
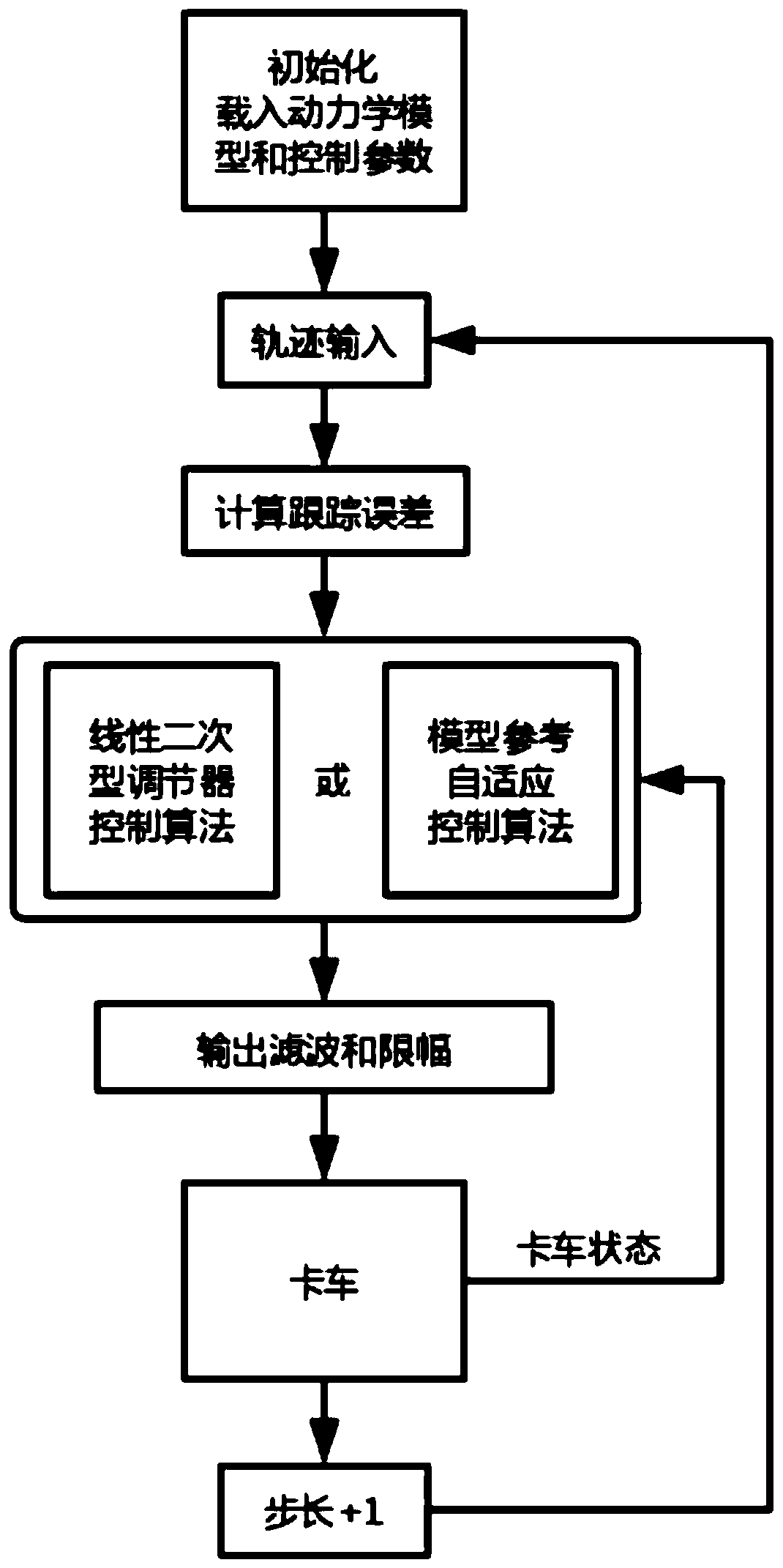
[0057] Such as figure 2 As shown, it is a flow chart of an embodiment of a lateral control method for an autonomous truck according to the present invention. Specifically, it includes the following steps:
[0058] Step S000: system initialization. Load the linearized vehicle dynamics model, load the weight matrix of the linear quadratic regulator, load the model reference adaptive reference model and control algorithm models such as adaptive parameters.
[0059] The dynamic model of the vehicle is established in the form of state equation as follows:
[0060]
[0061] The parameters are all truck parameters and can be measured and calculated.
[0062] The weight matrices of linear quadratic regulators are all diagonal matrices, the form is as follows:
[0063]
[0064]
[0065] Here, the state equation is used to represent the reference model, and the model is decoupled into two separate subsystems with respect to the lateral position of the lane and the vehicle y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More