

Pipeline cleaning robot control system and method
A control system and control method technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as unable to meet the needs of power station pipeline cleaning, achieve accurate cleaning, improve efficiency and quality, and reduce costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to enable those skilled in the art to understand the present invention more clearly, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
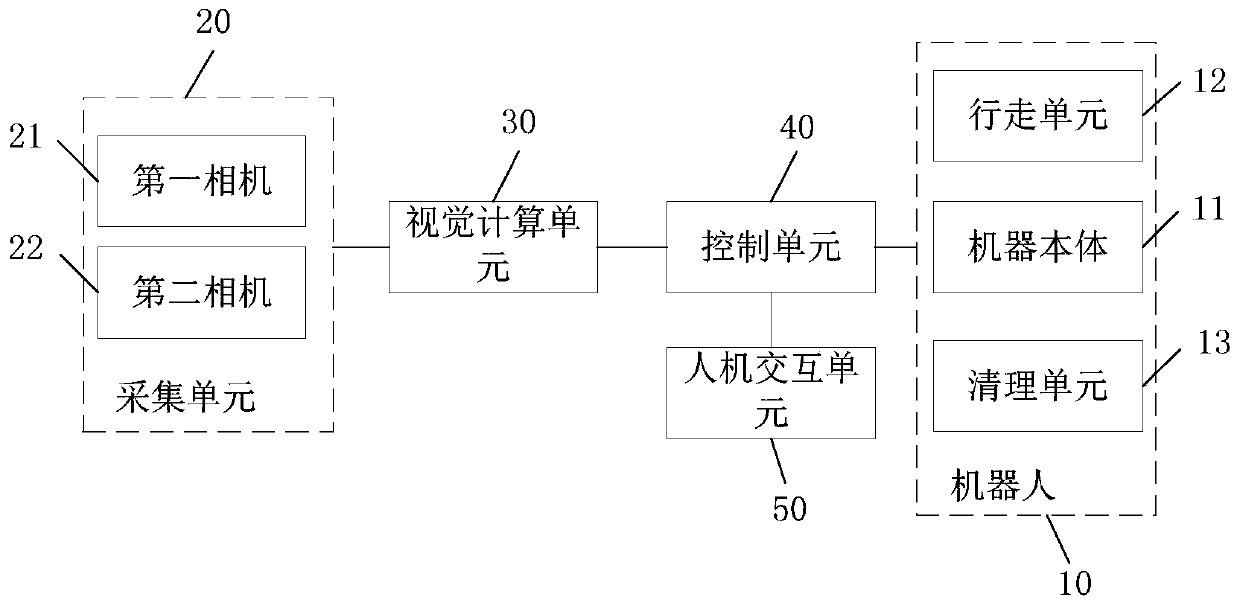
[0032] figure 1 It is a schematic diagram of the pipeline cleaning robot control system provided by the embodiment of the present invention, such as figure 1 As shown, the control system includes a robot 10 for cleaning the pipeline, and also includes an acquisition module 20, a visual computing unit 30 and a control unit 40, the acquisition module 20 is installed on the robot 10, and is used to acquire the first image of the inner wall of the pipeline in real time; The visual calculation unit 30 is connected to the acquisition module 20, and is used to judge whether there is an object to be cleaned on the inner wall of the pipeline according to the first image; if so, calculate the preliminary position of the object to be cleaned and plan th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More