Auxiliary calibration device and method for tail end pose of mechanical arm
A calibration device and pose calibration technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high manipulator operation requirements, lack of universal applicability, and long time-consuming, and achieve low operation difficulty and calibration The effect of high efficiency and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
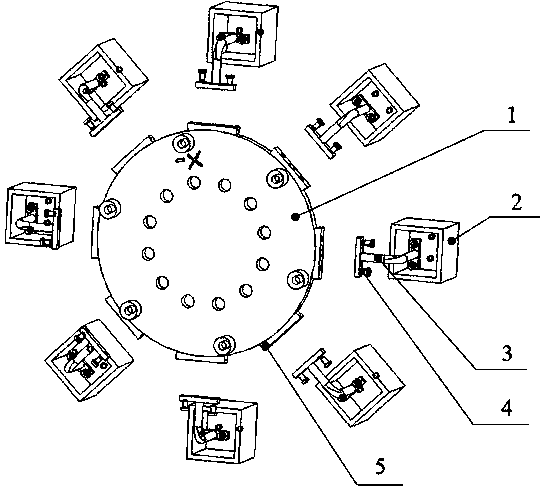
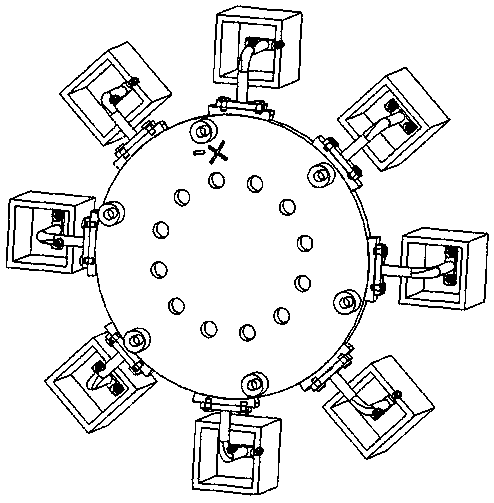
[0029]An auxiliary calibration device for the position and posture of the end of the mechanical arm in this embodiment is characterized in that it includes a flange 1, a calibration regular polyhedron 2 and a connecting rod 3, the center of the disk on one side of the flange 1 and the industrial mechanical arm The end effector is fixedly connected, and there are multiple calibration regular polyhedrons 2. The calibration regular polyhedron 2 is fixed on the outer side of the peripheral surface of the flange 1 through the connecting rod 3, except for the side connecting the calibration regular polyhedron 2 and the connecting rod 3, and the other surfaces Target paper is attached to each surface, and the codes of each target paper are different. The target paper is located within the visual range of the calibration vision equipment at the end of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More