

Variable stiffness joint based on cylindrical cam and control method thereof
A cylindrical cam and variable stiffness technology, applied in the field of robotics, can solve problems such as low stiffness, long response time of stiffness adjustment, and failure of elastic element adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with accompanying drawing.
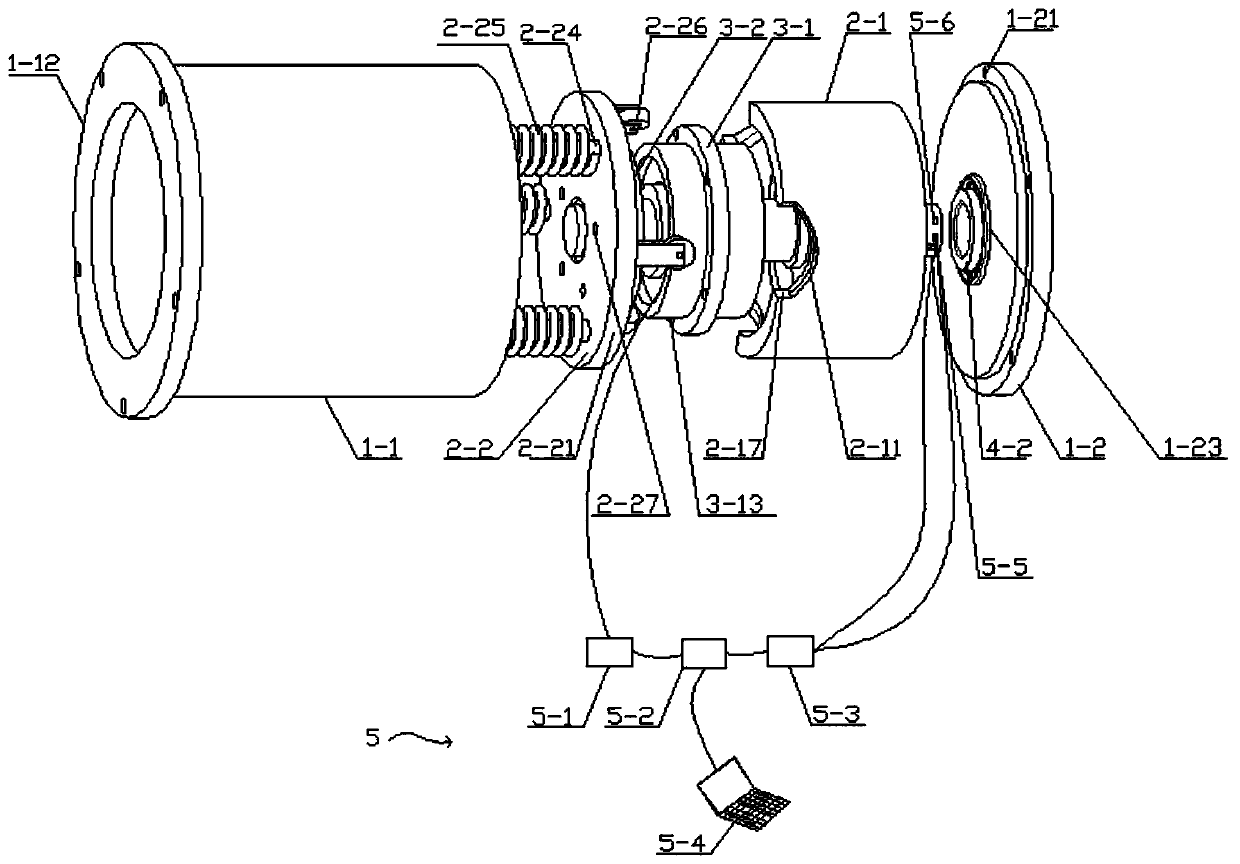
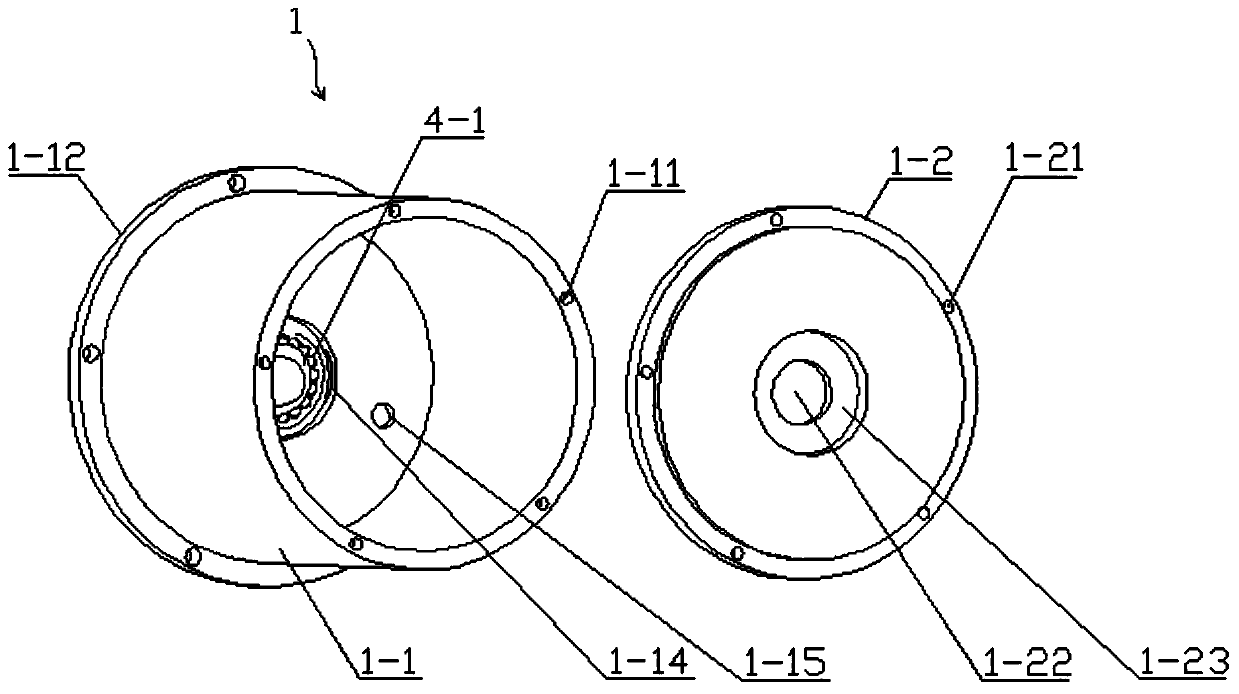
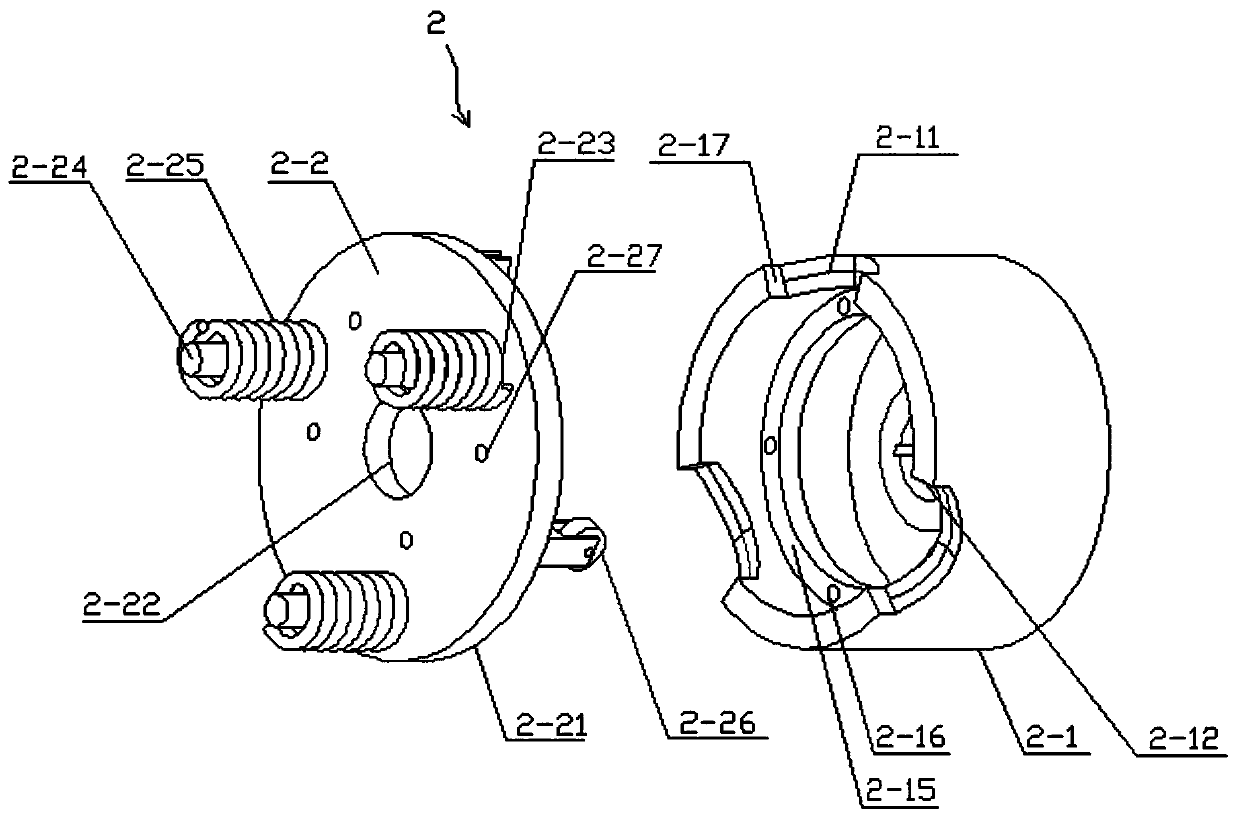
[0035] Such as Figures 1 to 6 As shown, a variable stiffness joint based on a cylindrical cam includes a joint housing 1, a cylindrical cam mechanism 2, an electromagnetic variable stiffness mechanism 3, an output shaft 4 and a stiffness control system 5, and the joint housing 1 includes a cylinder 1-1 and the end cover 1-2, one end of the cylinder 1-1 is connected through, and a plurality of threaded holes a1-11 are provided in the circumferential direction of the end surface; the outer wall of the other end of the cylinder 1-1 is provided with a connecting flange 1-12 , the bottom plate of the cylinder 1-1 is provided with a circular concave platform a1-14 on the side close to the through end with the central axis of the cylinder as the center; a plurality of circular concave platforms are provided on the bottom plate of the cylinder outside the circular concave platform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More