

3D four-wheel positioning detection method based on homography matrix optimization
A homography matrix and four-wheel alignment technology, which is applied in measuring devices, instruments, optical devices, etc., can solve the problems of insufficient development of 3D four-wheel alignment technology, and achieve the goal of being conducive to solving four-wheel alignment parameters, accurate Calibration parameters and the effect of reducing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
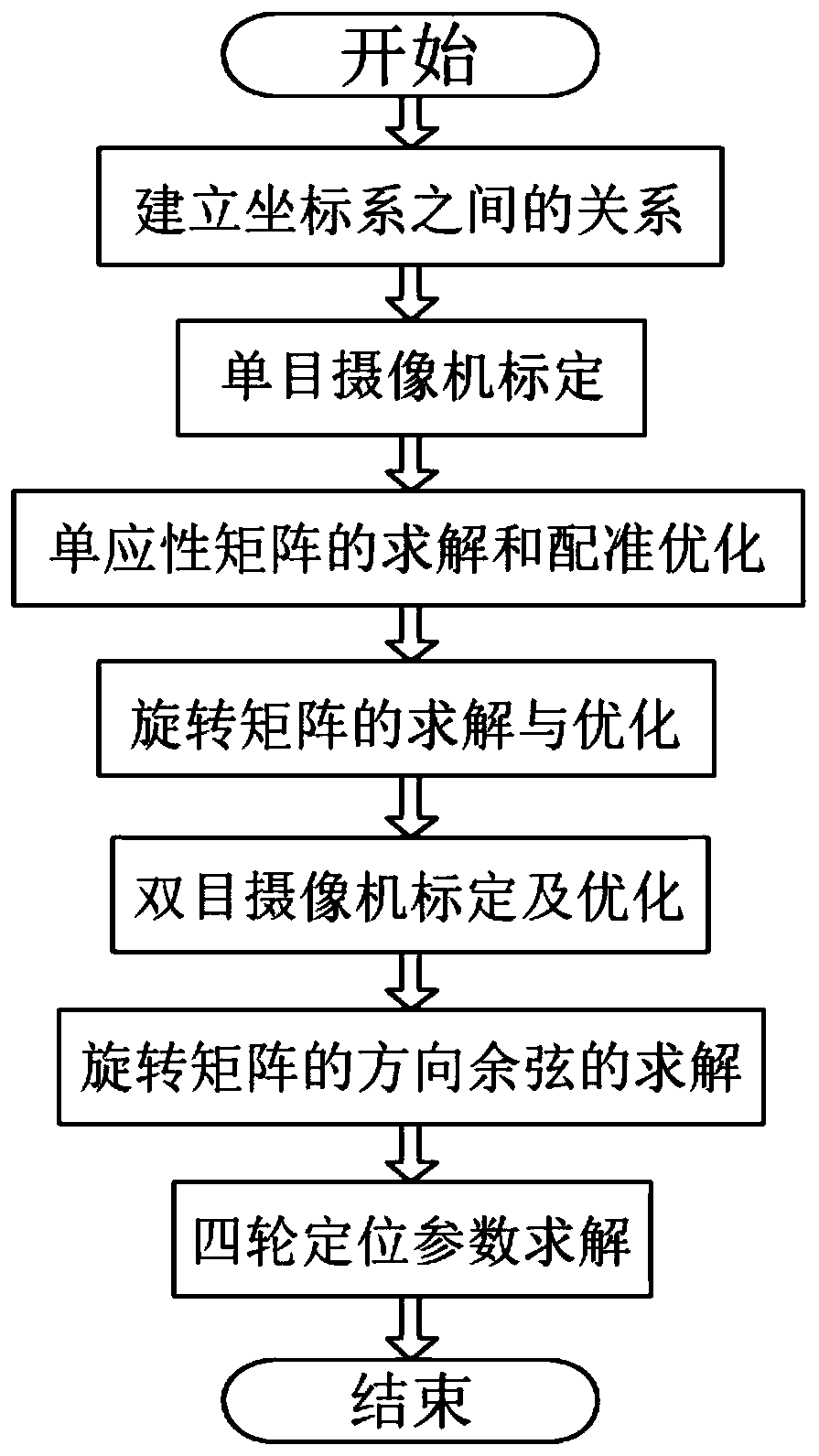
[0029] A 3D four-wheel alignment detection method based on homography matrix optimization in this embodiment, the detection process includes establishing the relationship between coordinate systems, camera calibration, solution of homography matrix and registration optimization, solution of rotation matrix and optimization, the direction cosine solution of the rotating shaft and the solution of the four-wheel alignment parameters, the specific steps are as follows (see figure 1 ):
[0030] Step 1. Establish the relationship between coordinate systems
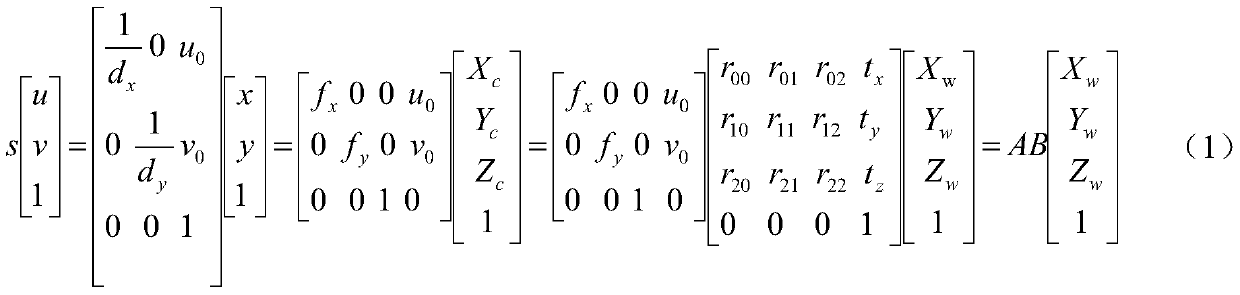
[0031] The relationship between the various coordinate systems is established firstly from the image physical coordinate system to the image pixel coordinate system, then from the camera coordinate system to the image physical coordinate system, and finally from the world coordinate system to the camera coordinate system to obtain the coordinate system from the world coordinate system To the transformation relationship of the i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More