

Unsupervised pose and depth calculation method and system
A deep computing, unsupervised technology, applied in computing, neural learning methods, image data processing, etc., can solve problems such as large number of parameters, no consideration of model complexity, no use of motion constraints, etc., to improve accuracy and depth. Estimation accuracy and the effect of improving the accuracy of pose estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
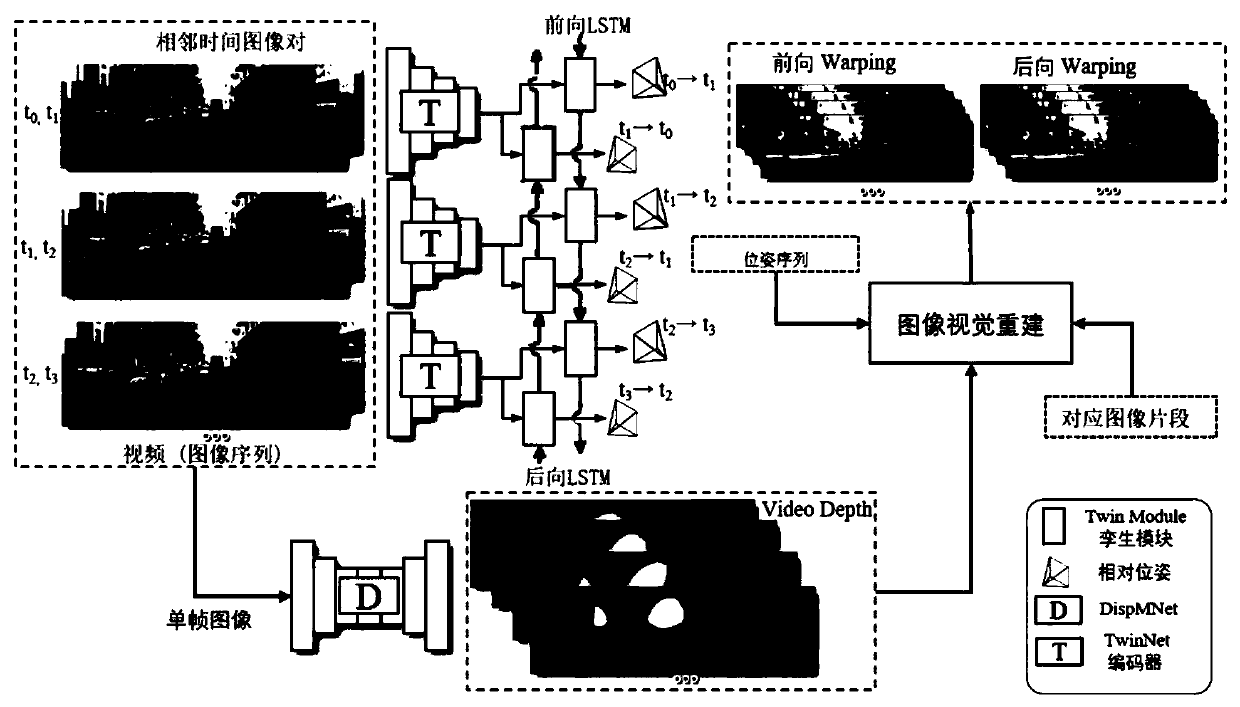
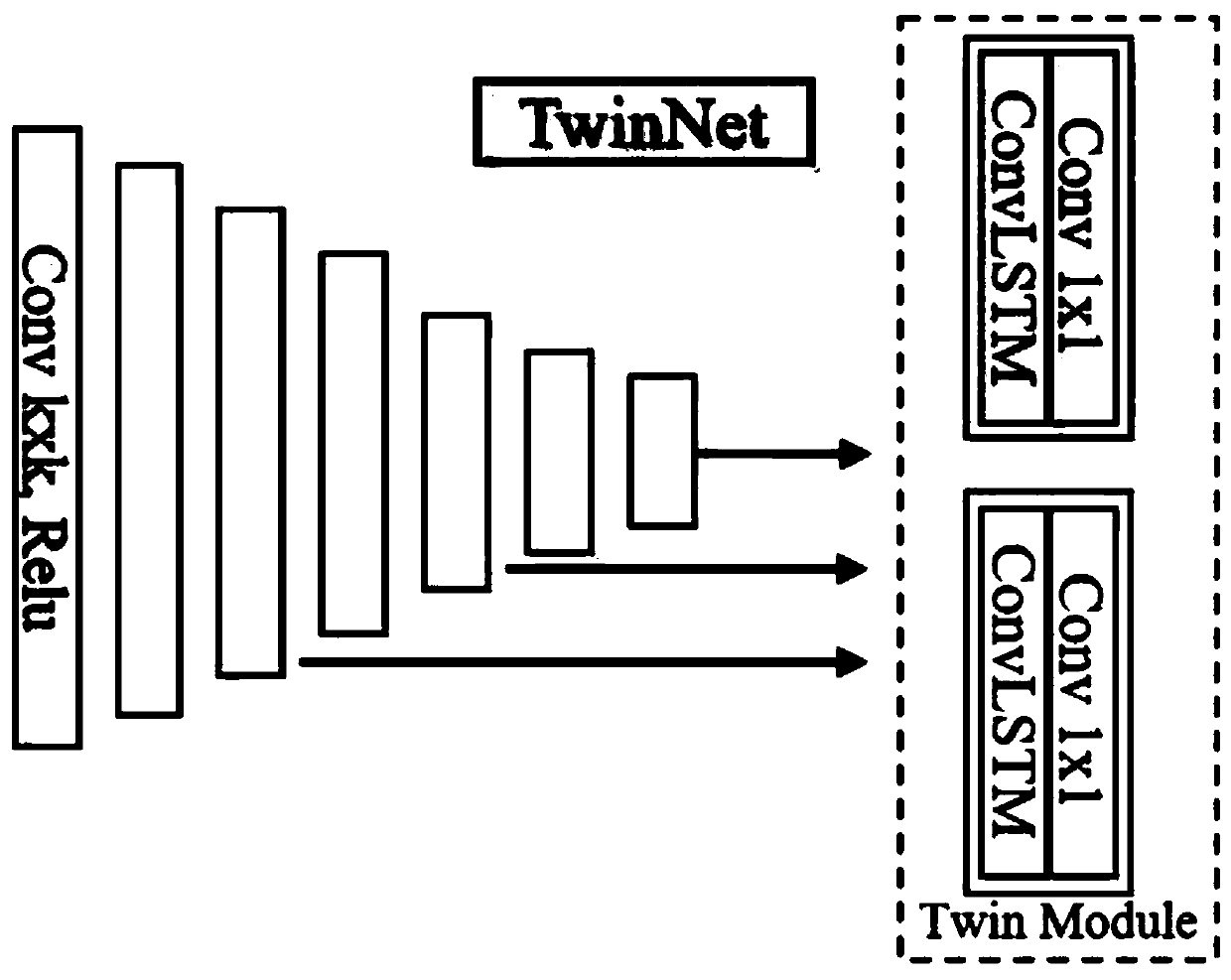
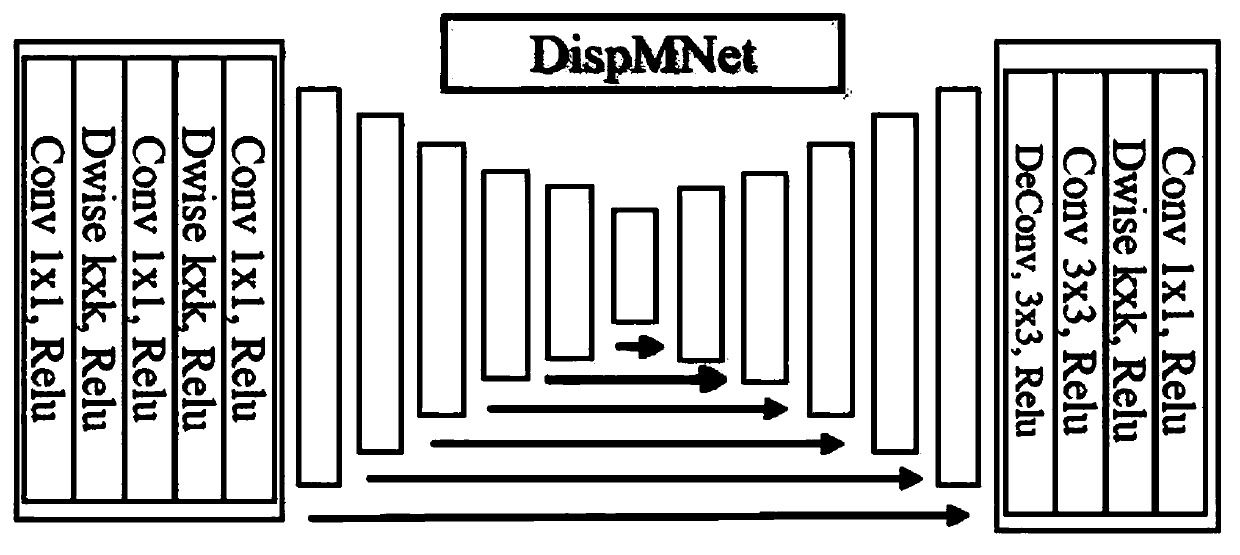
[0047] Such as Figure 1-6 As shown, an unsupervised pose and depth calculation method mainly uses the following modules: pose prediction network model TNet, depth estimation network model DMNet, visual reconstruction model V and error loss function module. The TNet model includes an encoder and a twin module, where the encoder contains 7 layers of convolutional layers, each layer of convolutional layer is connected to an activation function, and the convolution kernel sizes are 7, 5, 3, 3, 3, 3, 3 ; The twin module contains two sub-network modules with the same structure, which are respectively used to process the pose prediction during forward or backward motion. Each sub-module consists of a ConvLstm layer and a convolutional layer Conv with a convolution kernel size of 1. DMNet consists of three parts: encoder, decoder, and connection layer. The encoder consists of 7 layers of convolution modules. Each convolution module specifically includes: convolution layer (convolutio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More