Remote supervision method, device and system for automatic driving vehicle
A technology of remote supervision and automatic driving, which is applied in the field of remote supervision of self-driving vehicles, which can solve the problems of low confidence and achieve the effect of improving confidence and decision-making accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
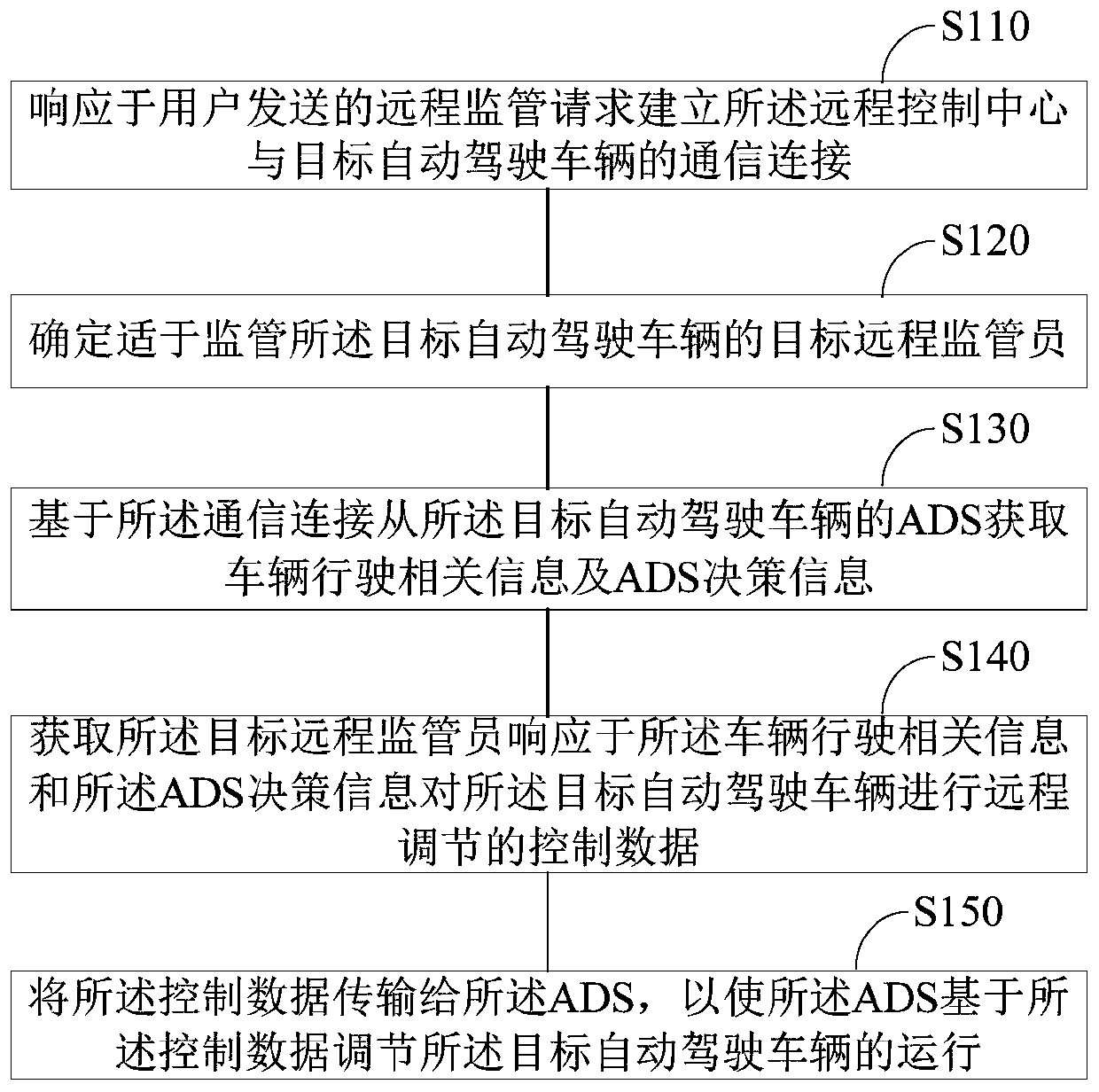
[0042] figure 1 It is a schematic flowchart of a remote supervision method for an autonomous vehicle according to Embodiment 1 of the present invention, and the remote supervision method is applied to a remote control center. Such as figure 1 As shown, the remote supervision method of the self-driving vehicle may include the following steps:
[0043] Step S110, establishing a communication connection between the remote control center and the target self-driving vehicle in response to the remote supervision request sent by the user.
[0044] In one example, the user owns a self-driving vehicle, and the user wishes to request the remote control center to deploy a remote supervisor to supervise the entire self-driving vehicle from a specified starting point (such as point A) to a specified end point (such as point B). journey. In this example, the step S110 may include:
[0045] Step S111A, receiving the first remote supervision request sent by the user through the user termi...
Embodiment 2
[0105] Embodiment 2 of the present invention is based on the same inventive idea as Embodiment 1, and provides a remote monitoring device for an automatic driving vehicle applied to a remote control center. Figure 5 It is a schematic structural diagram of the remote monitoring device for self-driving vehicles according to Embodiment 2 of the present invention. Such as Figure 5 As shown, the remote supervision device of the self-driving vehicle includes: a communication establishment module 510, configured to establish a communication connection between the remote control center and the target self-driving vehicle in response to a remote supervision request sent by the user; a supervisor determination module 520, used to To determine a target remote supervisor suitable for supervising the target self-driving vehicle; the first acquisition module 530 is used to obtain vehicle driving-related information and ADS decision-making from the automatic driving system ADS of the targe...
Embodiment 3
[0114] Embodiment 3 of the present invention provides a schematic structural diagram of a remote monitoring device for an automatic driving vehicle. The remote supervision device of the self-driving vehicle is applied to a remote control center, and includes a processor, a memory, and a program stored on the memory and operable on the processor. When the processor executes the program, the automatic A remote supervision method for driving a vehicle.
[0115] Wherein, the processor includes a kernel, and the kernel retrieves corresponding program units from the memory. The kernel can be set to one or more, and the corresponding remote supervision method of the self-driving vehicle can be realized by adjusting the kernel parameters.
[0116] Among them, the memory may include non-permanent memory in computer-readable media, random access memory (RAM) and / or non-volatile memory, such as read-only memory (ROM) or flash memory (flash RAM), memory includes at least one memory chip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More