

Height control method for near-crop flight of plant protection unmanned aerial vehicle
A plant protection UAV and height control technology, which is applied in vehicle position/route/height control, attitude control, control/adjustment system, etc., can solve the problems of inability to realize spray operation adaptability and low cost, and achieve spray effect Good, reduce damage, increase adaptability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further explained below in conjunction with the accompanying drawings and examples.
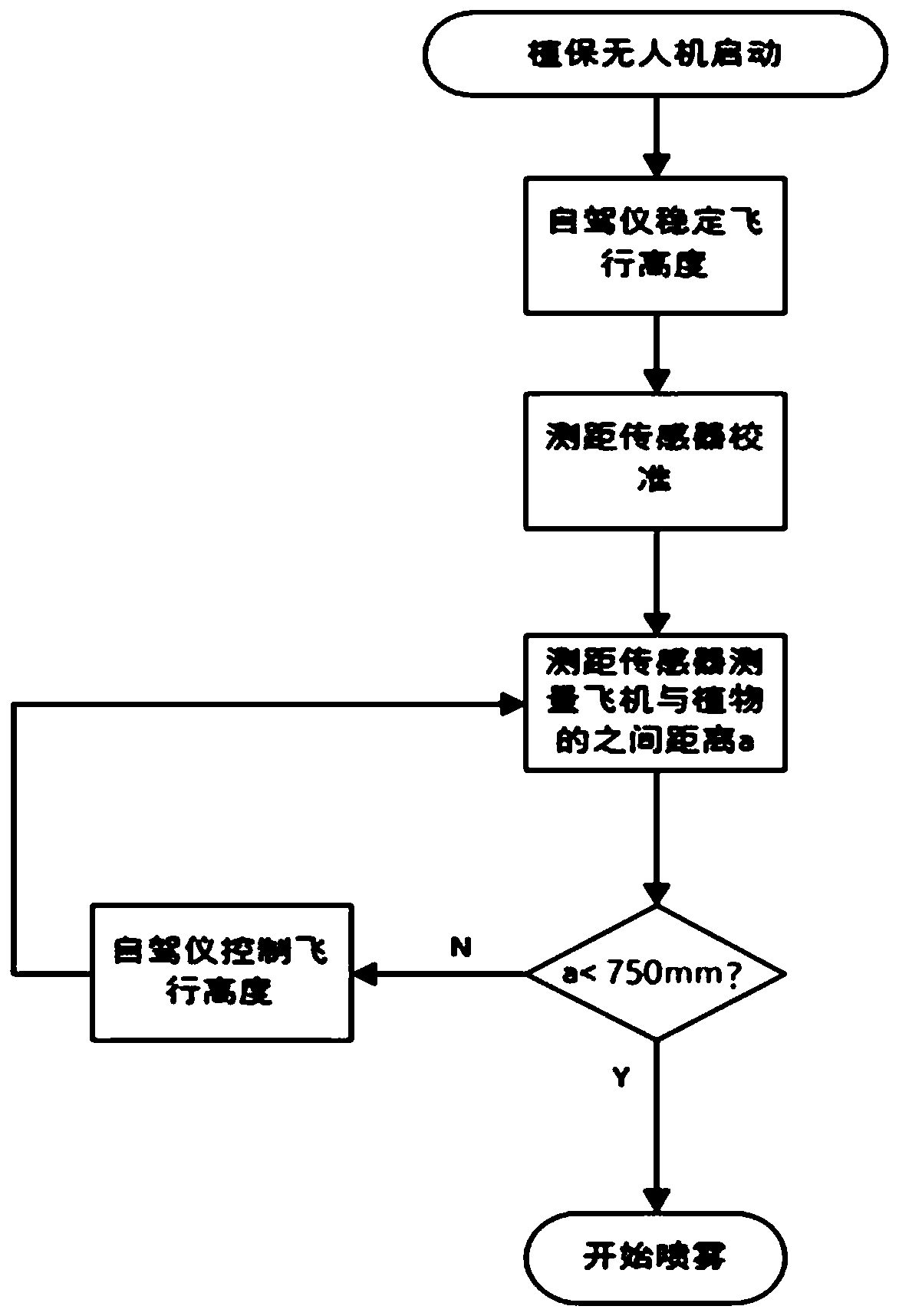
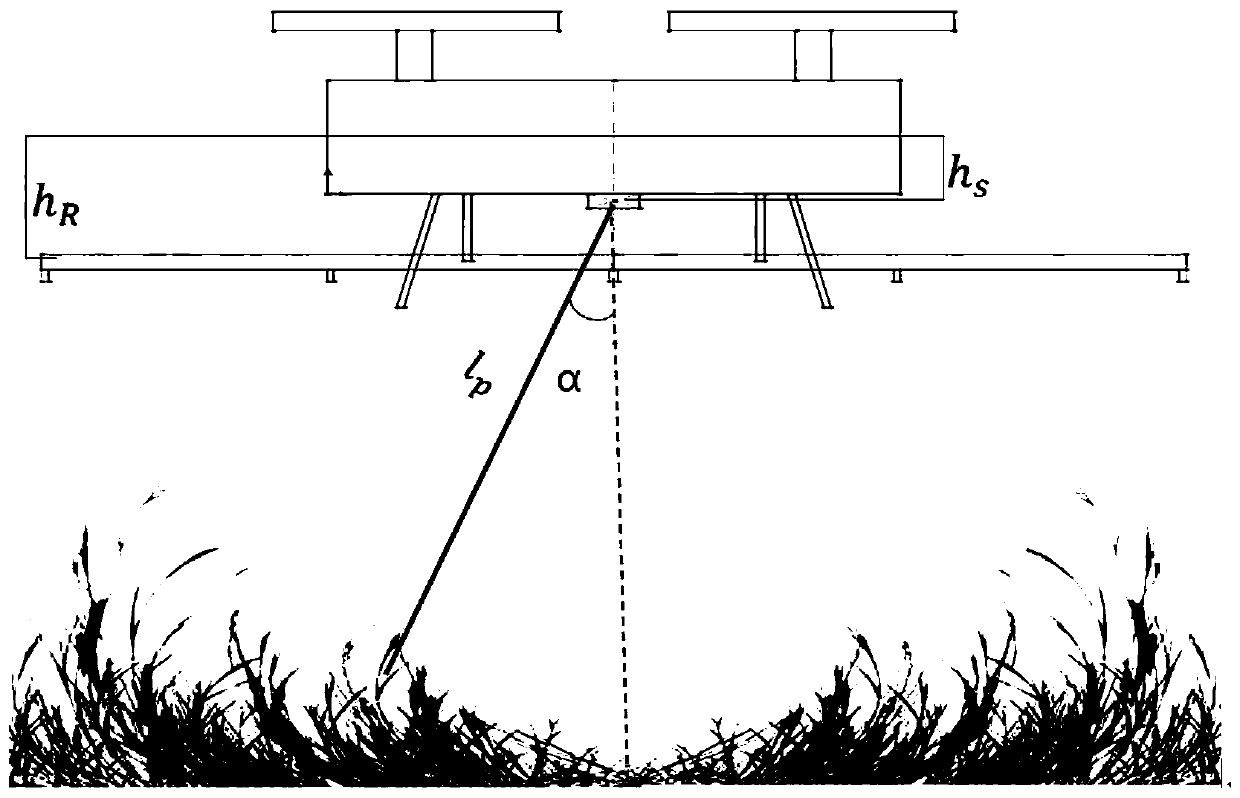
[0030] Such as figure 1 As shown, the overall height control of the plant protection UAV from the crops is completed by the flight control system inside the autopilot. When starting up, the GPS module first completes the height positioning of the plant protection UAV, and then completes the highly stable control through the autopilot; when performing operations, affected by the wind field, when the crops produce lodging-like changes, the ranging module measures the plant protection drone. The distance between the drone and the crops; lower the flying height of the aircraft to ensure that the crops are within a certain spray range; during the flight of the drone, the measurement data is fed back in real time to complete real-time control.
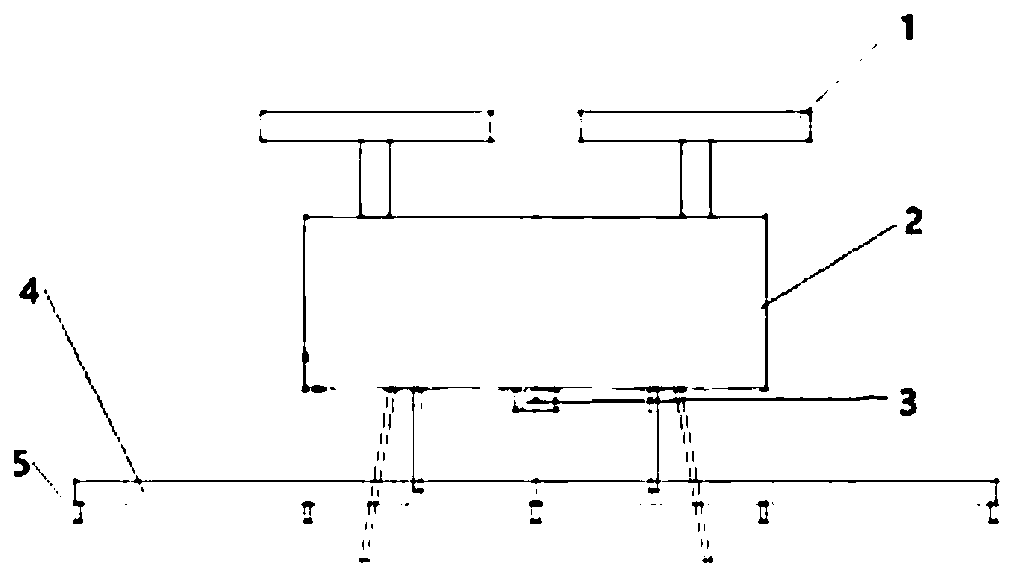
[0031] Such as figure 2 As shown, the spray boom is installed at the lower end of the plant protection drone body, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More