

Underwater magnetic field measurement attitude noise removal method and device
A magnetic field measurement and noise technology, which is applied in the direction of measuring devices, magnetic variable measurement, geophysical measurement, etc., can solve the problems of inability to remove motion noise, inapplicability, and inability to completely remove underwater magnetic field measurement noise, etc., to achieve removal and Correction of geometric effects and effect of ensuring reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0057] Attitude Noise Removal Method for Underwater Magnetic Field Measurement
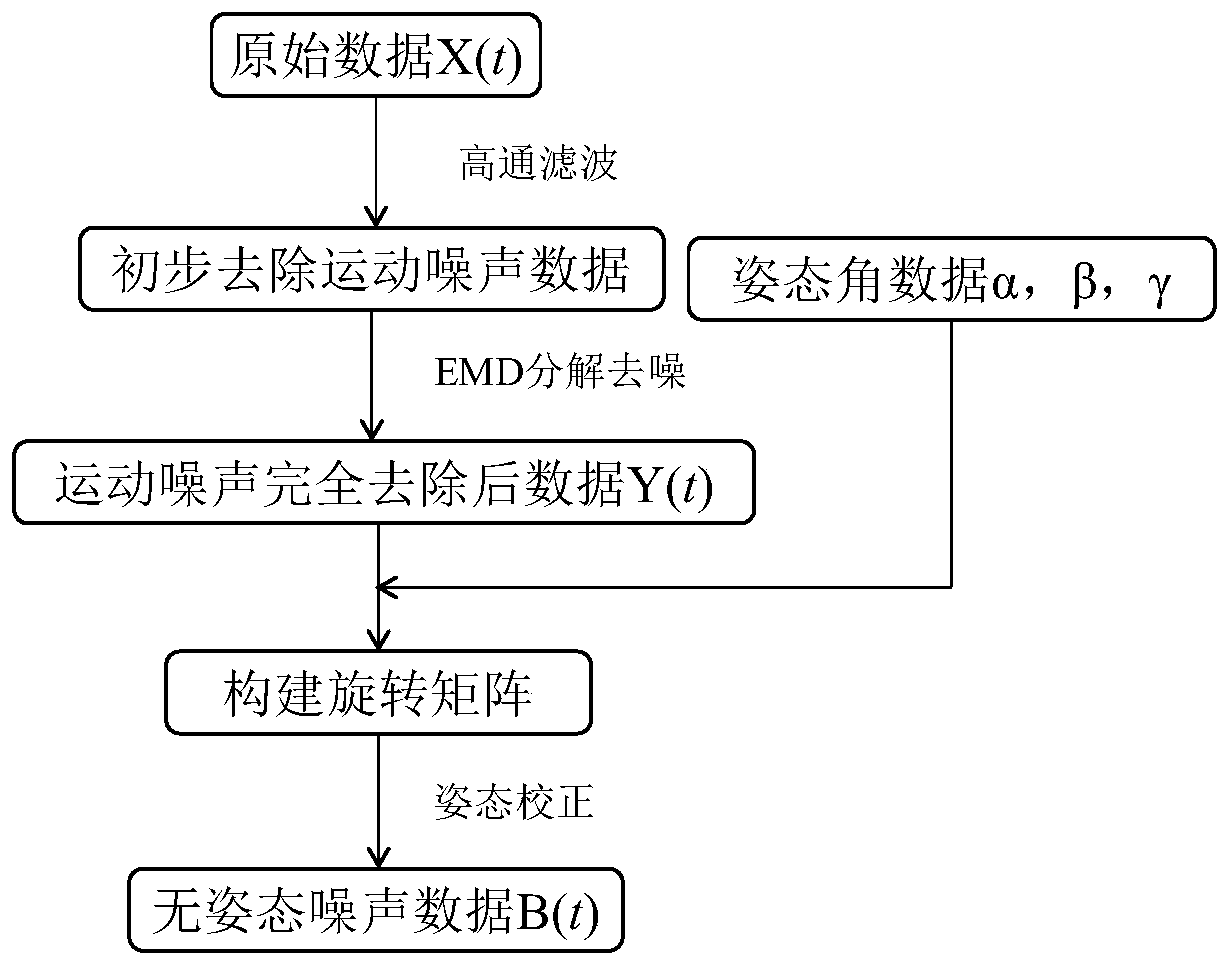
[0058] Such as figure 2 As shown, a method for removing attitude noise in underwater magnetic field measurement includes the following steps:
[0059] Step 1: Filter the measurement signal output by the measurement sensor to remove motion noise.
[0060] First, use a high-pass filter to filter the measurement signal output by the measurement sensor. Such as figure 1 As shown, let the original data be x(t), because the motion noise decays rapidly with the increase of frequency, so the original data x(t) can be removed through a high-pass filter, and most of the motion noise can be removed, and the preliminary Data X(t) after removing motion noise. Since motion noise is mainly concentrated in the frequency range below 500Hz, the cutoff frequency of the high-pass filter is determined to be 500Hz accordingly.
[0061] After the measurement signal output by the measurement sensor is filtered by a...
Embodiment 2
[0092] Attitude noise removal device for underwater magnetic field measurement
[0093] Includes measurement sensor for measuring underwater magnetic fields. During implementation, an induction coil magnetic field sensor (magnetic bar, etc.) is used.
[0094] The nine-axis attitude measurement device is rigidly connected with the measurement sensor, and is used to obtain the real-time yaw angle α, pitch angle β, and yaw angle γ of the measurement sensor. During implementation, the nine-axis attitude measuring device is composed of a three-axis gyroscope, a three-axis magnetometer, and a three-axis accelerometer.
[0095] The attitude noise removal module is used to implement the above method, and removes the attitude noise from the measurement signal output by the measurement sensor.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More