

Single-pedal control method, device and system for electric automobile
A control method and electric vehicle technology, applied in electric vehicles, control devices, control drives, etc., can solve the problems of poor driving comfort, low control efficiency, low safety performance, etc., and achieve the effect of stable driving power performance and continuous torque output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
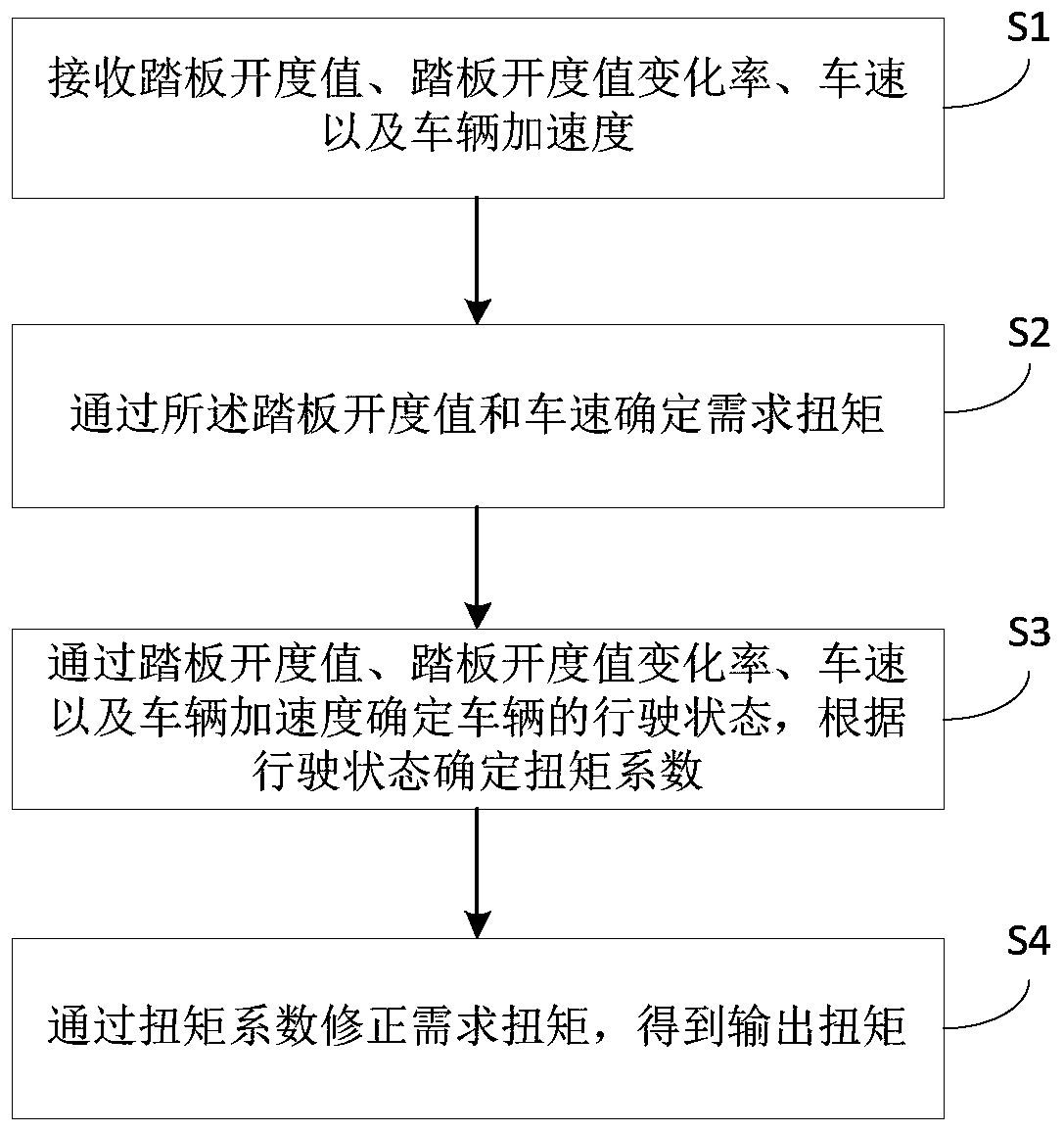
[0032] figure 1 It is the flow chart of the control method in the first embodiment. This embodiment can be applied to the single-pedal control of an electric vehicle. The method can be executed by a single-pedal control device of an electric vehicle. The device can be implemented by software. Configured in electronic equipment, such as motor controller or vehicle controller, refer to figure 1 The single-pedal control method for an electric vehicle proposed in this embodiment includes:
[0033] S1. Receive pedal opening value, rate of change of pedal opening value, vehicle speed, and vehicle acceleration.
[0034] S2. Determine the required torque through the pedal opening value and the vehicle speed.
[0035] In this step, the required torque can be determined by the pedal opening value and the vehicle speed by looking up the table. Exemplarily, the following formula can also be used for calculation:
[0036]
[0037] In the formula, C is the current pedal opening value, A is the cor...
Embodiment 2
[0085] Figure 8 It is the schematic diagram of the control device in the second embodiment, refer to Figure 8 , This embodiment provides a single-pedal control device for an electric vehicle, including:
[0086] The parameter receiving module 1 is used to receive the pedal opening value, the rate of change of the pedal opening value, the vehicle speed and the vehicle acceleration. The torque calculation module 2 is used to determine the required torque through the pedal opening value and the vehicle speed. The correction module 3 is used to determine the driving state of the vehicle through the pedal opening value, the rate of change of the pedal opening value, the vehicle speed and the vehicle acceleration, and to determine the torque coefficient according to the driving state. The output torque calculation module 4 is used to correct the required torque through the torque coefficient to obtain the output torque.
[0087] Among them, the correction module 3 queries the torque c...
Embodiment 3
[0093] Picture 9 It is the schematic diagram of the control system in the third embodiment, refer to Picture 9 This embodiment proposes a single-pedal control system for an electric vehicle, including a vehicle sensor 100, a controller 200, and a motor 300, where the vehicle sensor 100 is electrically connected to the controller 200, and the controller 200 is electrically connected to the motor 300.
[0094] The controller 200 receives the pedal opening value, the rate of change of the pedal opening value, the vehicle speed, and the vehicle acceleration sent by the vehicle sensor 100. The controller 200 determines the required torque through the pedal opening value and the vehicle speed, determines the driving state of the vehicle through the pedal opening value, the rate of change of the pedal opening value, the vehicle speed, and the vehicle acceleration, and determines the torque coefficient according to the driving state. The controller 200 corrects the required torque throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More