

Camera pose calibration method based on spatial point location information
A pose calibration and space point technology, applied in the field of robot vision, can solve problems such as limited precision and cumbersome operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described in detail below in combination with example diagrams and specific embodiments.
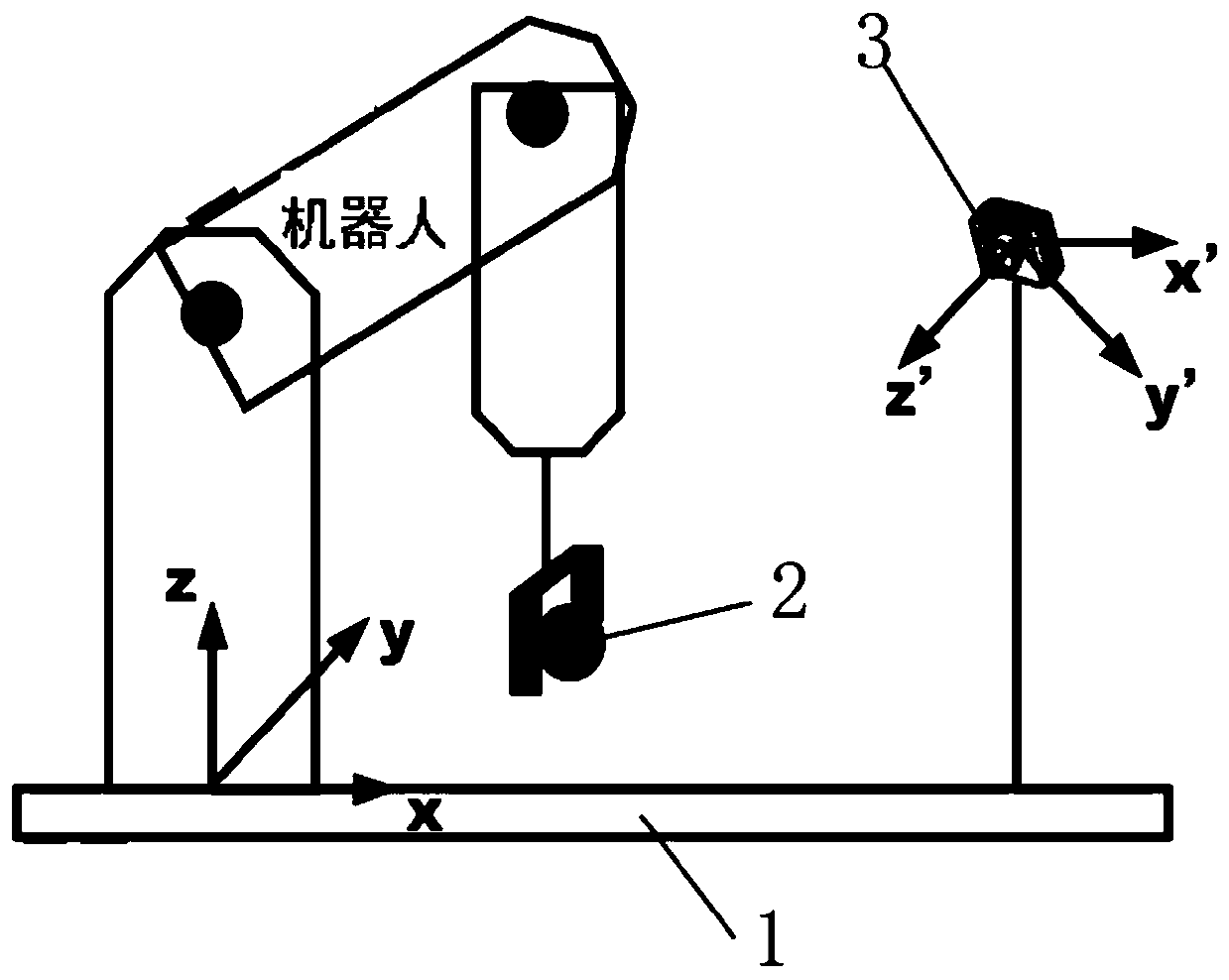
[0060] The present invention provides a camera pose calibration method based on spatial points, based on a robot, a three-dimensional camera acquisition system and a calibration object sphere for program implementation, wherein the robot is a general-purpose six-joint series industrial robot, and the three-dimensional camera has the ability to take pictures in real time and obtain three-dimensional The function of point cloud data, the calibration object sphere adopts table tennis. The table tennis ball is chosen as the calibration object, and its advantage is that the table tennis ball is moderate in size, easy to carry, and the size is an international uniform size, with a diameter of 40mm, and the standard is uniform. The schematic diagram of the construction and scheme of the system equipment is as follows: figure 1 As shown, the specific...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More