

INS/DR & GNSS loosely integrated navigation method based on MEMS inertial component
A navigation method and loosely combined technology, applied in the field of navigation, can solve problems such as deterioration of accuracy and inability to locate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0069] The present invention can perform appropriate compensation processing for the characteristics of the sensor, and reasonably plan and design the INS / DR system, and combine the application scene and the characteristics of the inertial system to simplify the system model and noise model of the integrated navigation kalman filter, and can obtain an excellent performance It is of great significance to solve the problem that the positioning accuracy of the traditional GNSS vehicle navigation monitoring system drops sharply in some high-rise buildings, tunnels, underground garages and other environments where the signals are seriously blocked or even disappear.
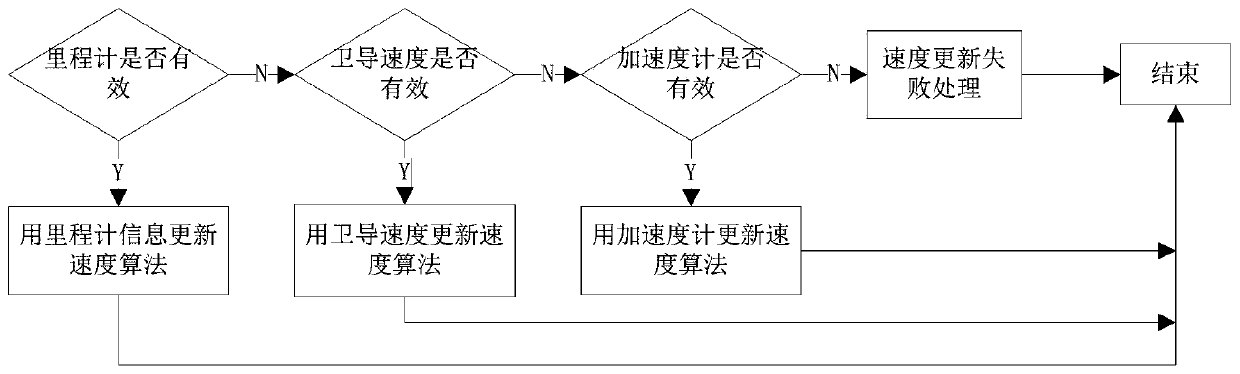
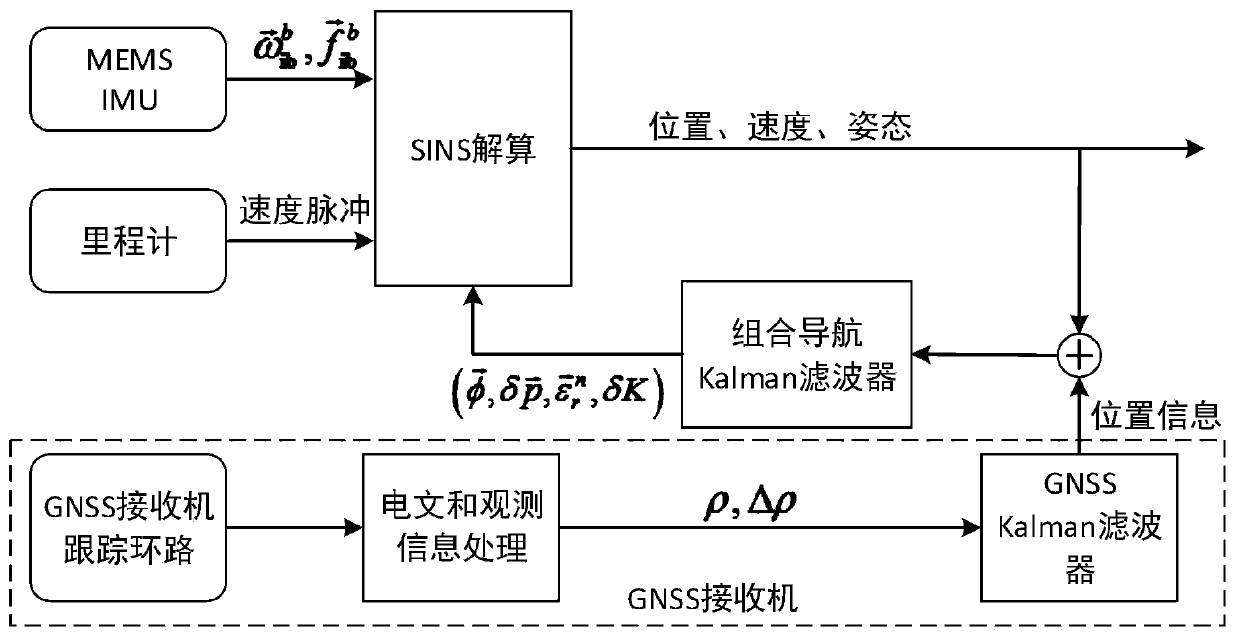
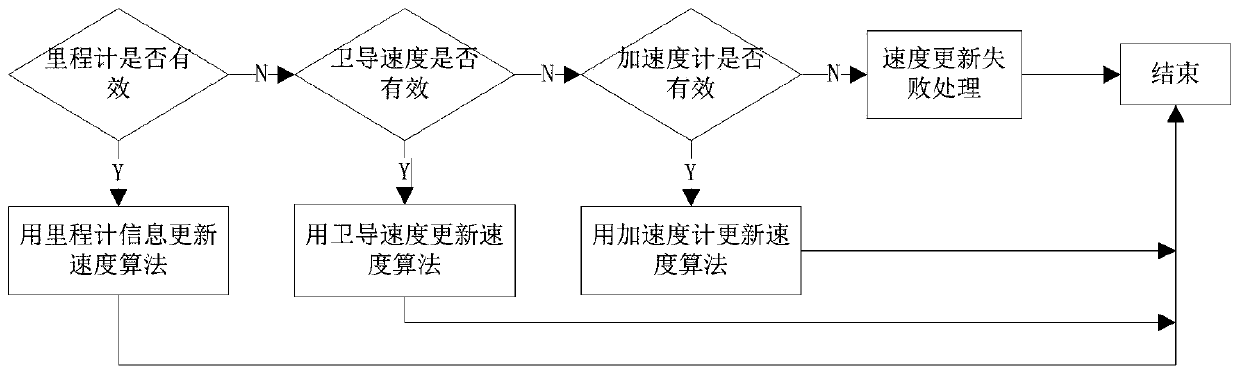
[0070] The invention discloses an INS / DR&GNSS loosely integrated navigation method based on MEMS inertial components, such as figure 2 shown, consists of the following steps:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More