

Hypersonic aircraft self-adaptive control method considering attack angle constraints
An adaptive control, hypersonic technology, applied in vehicle position/route/altitude control, non-electric variable control, control/regulation system, etc., can solve the problem of poor transient performance of hypersonic aircraft and insufficient combustion of scramjets And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
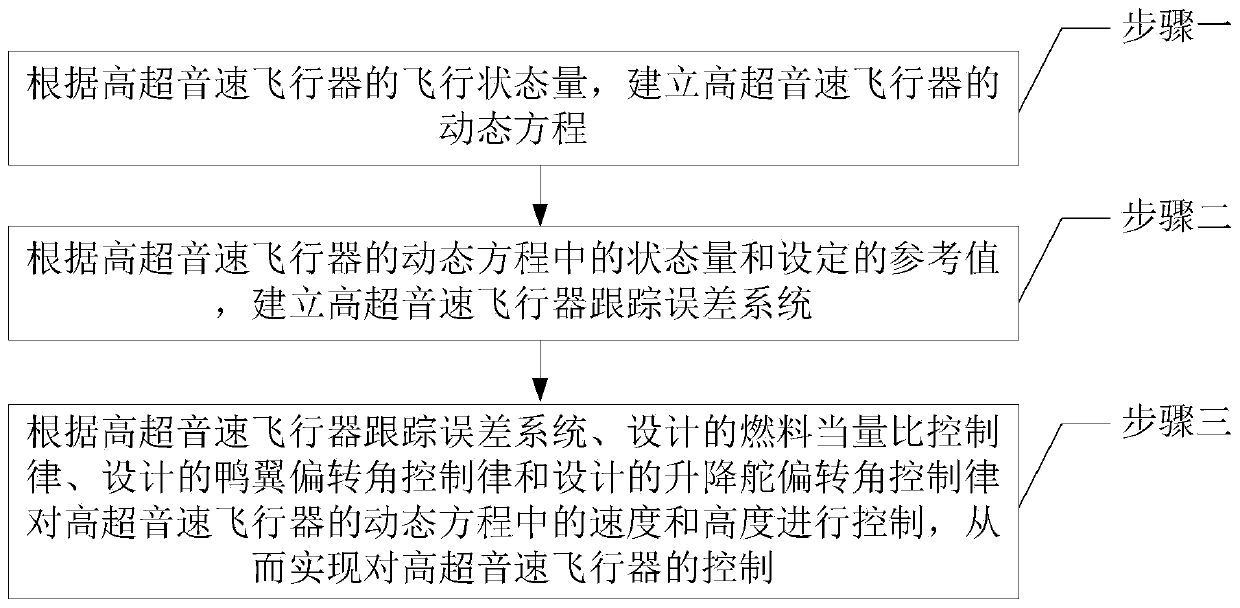
[0087] Specific implementation mode one: refer to figure 1 Specifically illustrate the present embodiment, the adaptive control method of the hypersonic vehicle considering the angle of attack constraint described in the present embodiment, the method includes the following steps:
[0088] Step 1, according to the flight state quantity of the hypersonic vehicle, establish the dynamic equation of the hypersonic vehicle;
[0089] Step 2, according to the state quantity in the dynamic equation of the hypersonic vehicle and the set reference value, establish the tracking error system of the hypersonic vehicle;
[0090] Step 3. Control the speed and height in the dynamic equation of the hypersonic vehicle according to the tracking error system of the hypersonic vehicle, the designed fuel equivalence ratio control law, the designed canard deflection angle control law and the designed elevator deflection angle control law, In order to realize the control of hypersonic aircraft.
specific Embodiment approach 2
[0091] Specific embodiment 2: This embodiment is to further explain the adaptive control method of the hypersonic vehicle considering the angle of attack constraint described in the specific embodiment 1. In this embodiment, in step 1, the dynamic equation of the hypersonic vehicle Including velocity V dynamic equation, altitude h dynamic equation, flight path angle γ dynamic equation, hypersonic vehicle attack angle α dynamic equation and pitch rate Q dynamic equation;
[0092] The velocity V kinetic equation is expressed as:
[0093]
[0094] In the formula, is the variation of velocity V, T is thrust aerodynamic force, m is mass, g is gravitational acceleration, D is drag aerodynamic force, is the dynamic pressure, ρ is the air density, S is the reference area, CD is the drag coefficient, δc is the canard deflection angle, δe is the elevator deflection angle, d γ,B is the unparameterized bounded unknown of the canard clearance feature, ζ2 is the failure coefficie...
specific Embodiment approach 3
[0145] Specific embodiment three: This embodiment is to further explain the adaptive control method of the hypersonic aircraft considering the angle of attack constraint described in the second specific embodiment. In this embodiment,
[0146] In step two, the hypersonic vehicle tracking error system includes the velocity tracking error z V , height tracking error z h , Angle of attack tracking error z α , flight track angle tracking error z γ and pitch rate tracking error z Q ;
[0147] speed tracking error z V for:
[0148] z V =V-V ref Formula 6,
[0149] In the formula, V ref a sufficiently smooth reference for velocity;
[0150] height tracking error z h for:
[0151] z h =h-h ref Formula 7,
[0152] where h ref A sufficiently smooth reference representing height,
[0153] flight track angle tracking error z γ for:
[0154] z γ =γ-v γ Formula 8,
[0155] In the formula, v γ A reference input representing the track angle γ;
[0156] Angle of atta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More