A method and device for dynamic target 3D detection
A dynamic target, 3D technology, applied in the application field of computer vision technology, can solve problems such as low accuracy, environmental perception information cannot meet the requirements of automatic driving scene perception, etc., to achieve guaranteed effects, reduce time and space complexity, and reduce complexity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
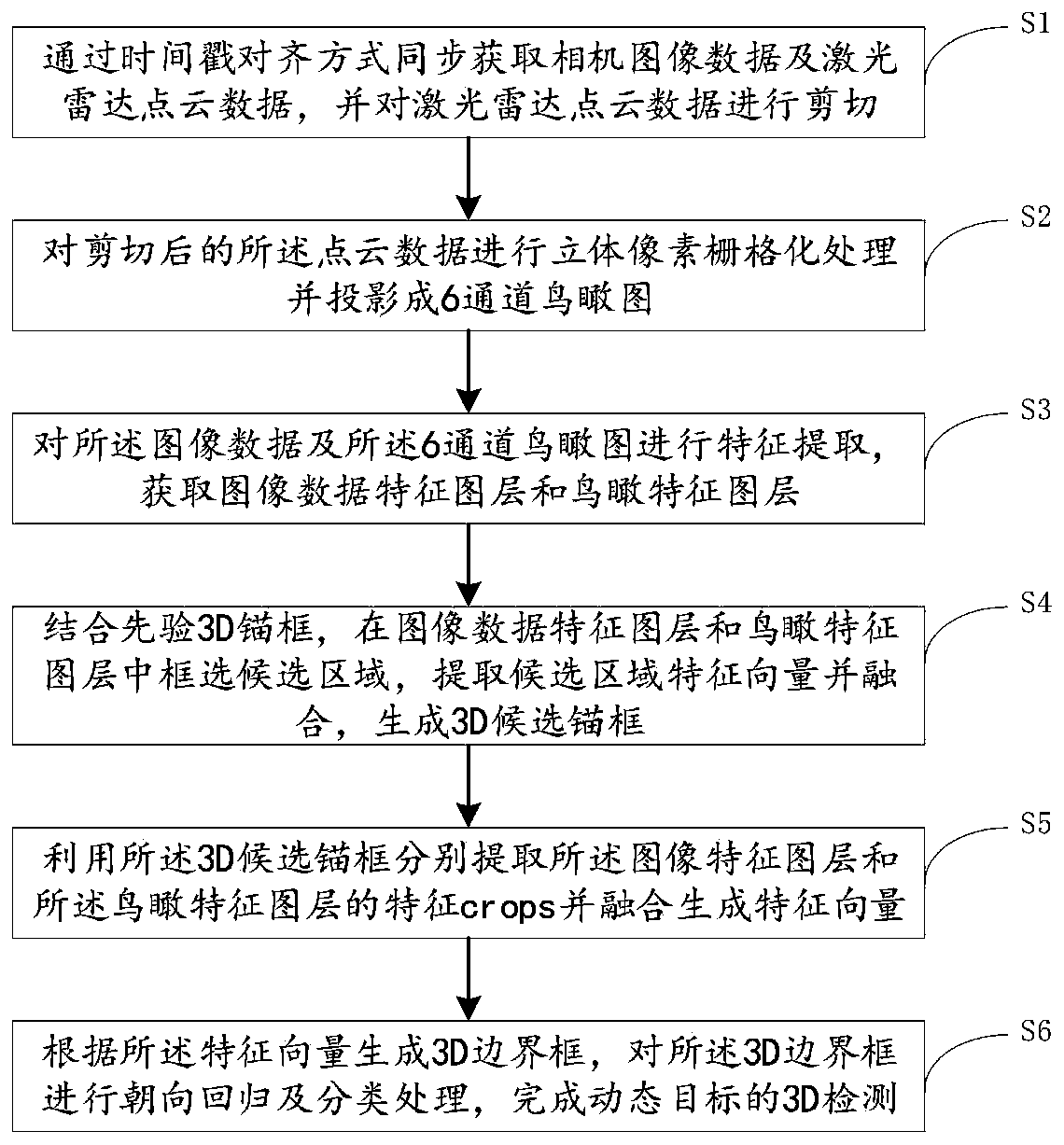
[0076] An embodiment of the present invention provides a method for dynamic target 3D detection, such as figure 1 shown, including the following steps:
[0077] S1, synchronously acquire camera image data and lidar point cloud data through time stamp alignment, and cut the lidar point cloud data;
[0078] S2, performing voxel rasterization processing on the clipped point cloud data and projecting it into a 6-channel bird's-eye view;
[0079] S3, performing feature extraction on the image data and the 6-channel bird's-eye view image, and acquiring image data feature layers and bird's-eye view feature layers;
[0080] S4, combined with the prior 3D anchor frame, select the candidate area in the image data feature layer and the bird's-eye view feature layer, extract the feature vector of the candidate area and fuse it, and generate a 3D candidate anchor frame;
[0081] S5, using the 3D candidate anchor frame to respectively extract the feature crops of the image feature layer a...
Embodiment 2
[0133] An embodiment of the present invention provides a device for dynamic target 3D detection, including:
[0134] The data acquisition module acquires camera image data and lidar point cloud data synchronously through time stamp alignment, and cuts the lidar point cloud data;
[0135] A rasterization processing module, which performs voxel rasterization processing on the cut point cloud data and projects it into a 6-channel bird's-eye view;
[0136] The feature layer generation module extracts the features of the image data and the 6-channel bird's-eye view, and obtains the image data feature layer and the bird's-eye view feature layer;
[0137] The 3D candidate anchor box generation module fuses the image data feature layer and the bird's-eye view feature layer, and combines the prior 3D anchor box to generate a candidate area and obtain a 3D candidate anchor box;
[0138]A feature vector generation module, using the 3D candidate anchor frame to extract the feature crops ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com