

Modular foot-type single leg and cycloid planning method based on low reduction ratio motor technology
A technology of reduction ratio and modularization, which is applied in the field of modular footed single leg and control system, can solve the problems of low knee joint transmission efficiency, difficult motor torque control, unstable transmission torque, etc., and can solve synchronous belt slippage, position The effect of high control precision, easy disassembly and replacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
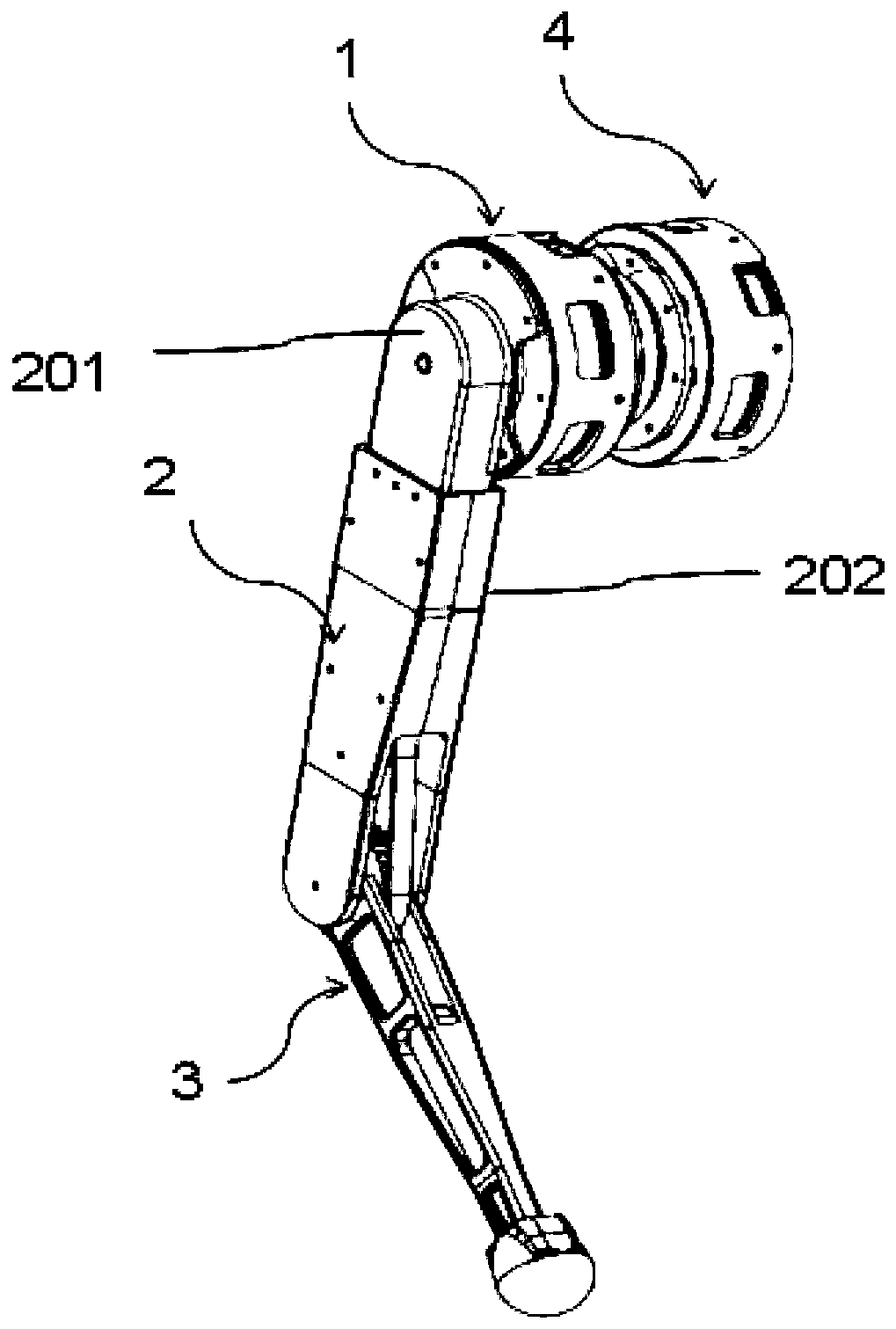
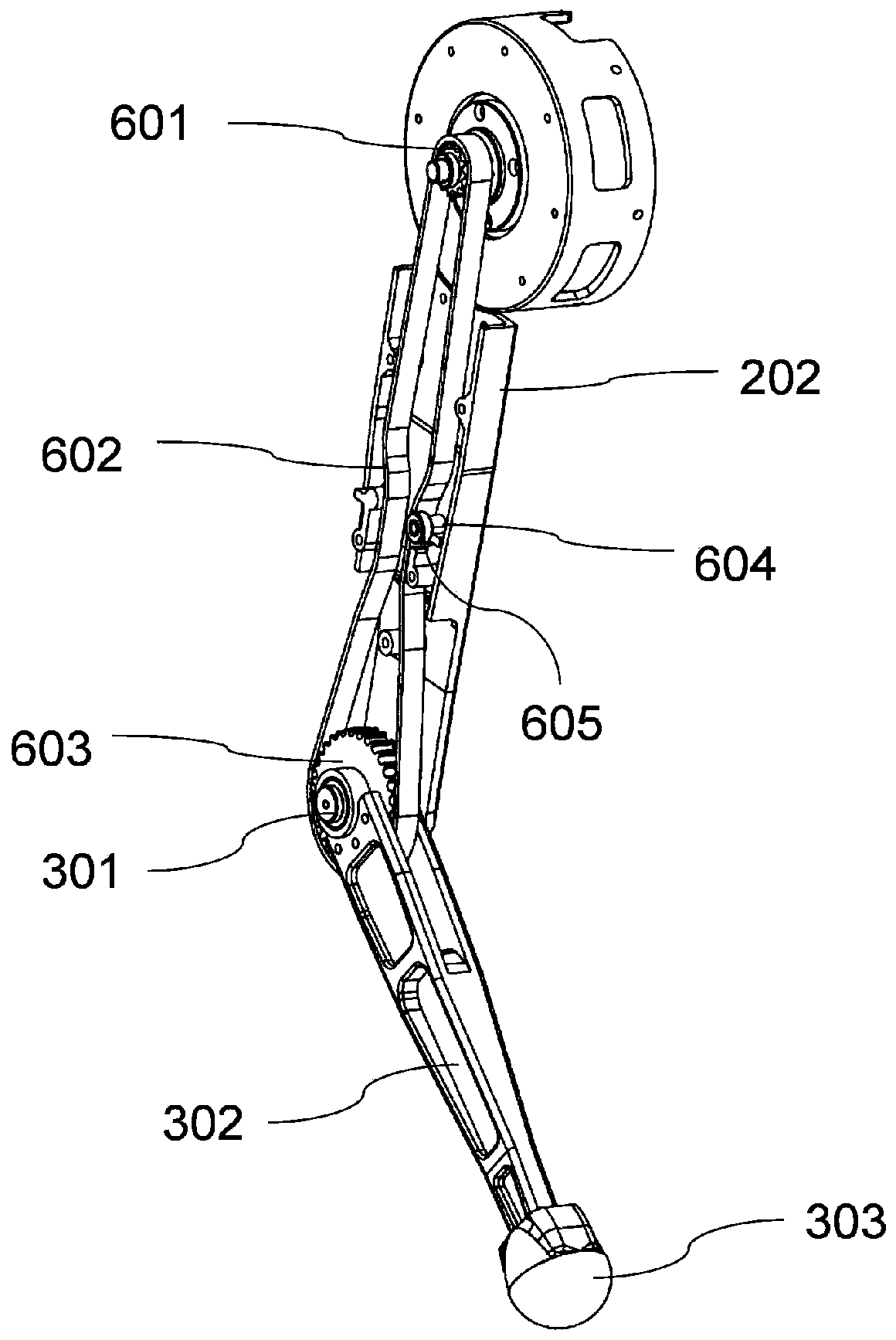
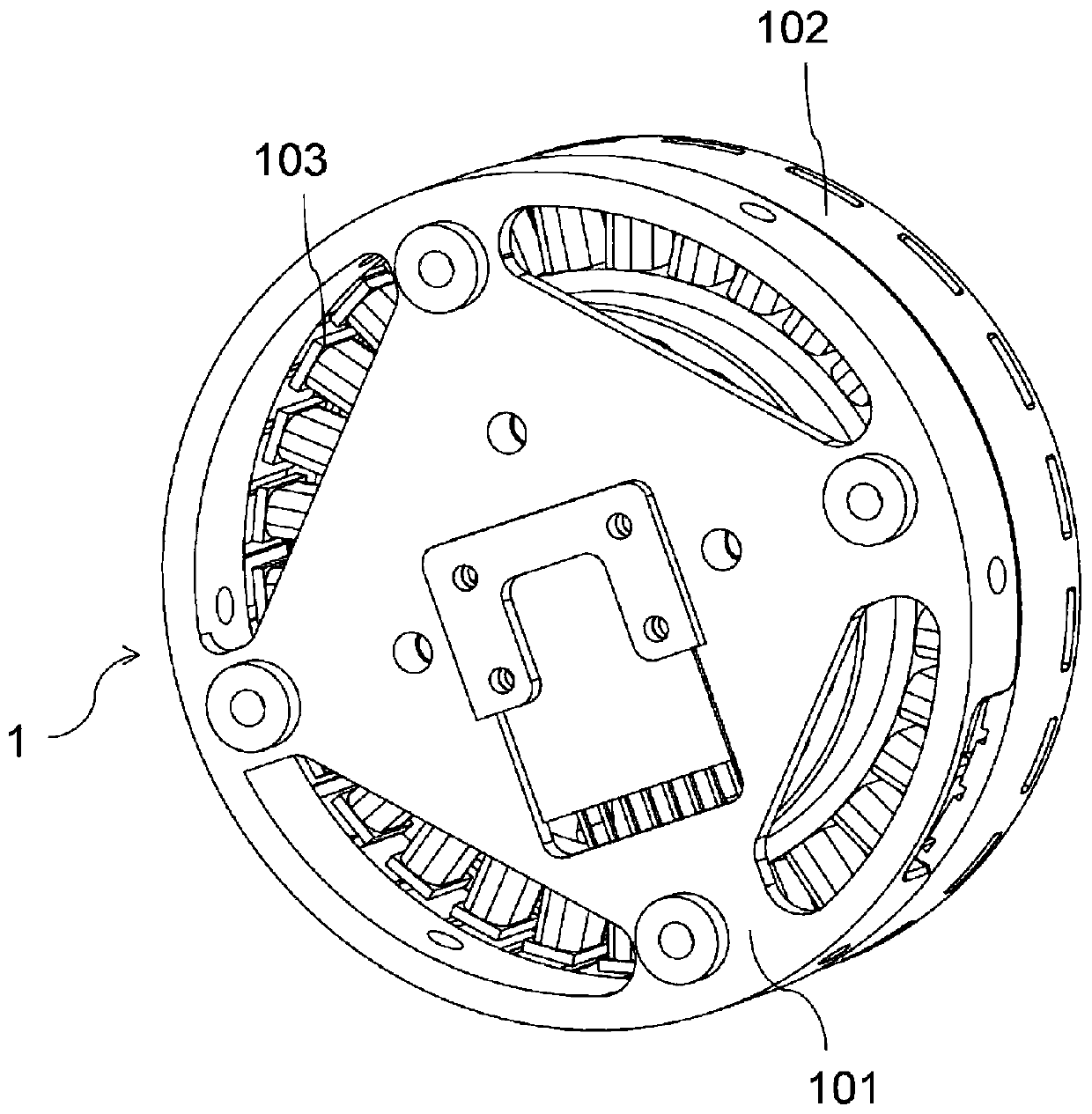
[0043] see Figure 1 to Figure 8 , a modular footed single leg based on low reduction ratio motor technology, which includes a hip joint drive module and a footed single leg; the footed single leg includes a knee joint drive motor 1, a thigh structure module 2, and a calf structure module 3. The thigh structure module 2 is flat as a whole. The thigh structure module 2 includes a thigh shell 201 and two thigh side plate shells 202. The thigh shell 201 constitutes the top of the thigh structure module 2. The two thigh side plate shells 202 are matched and installed to form a thigh structure module. 2, the bottom of the thigh structure module 2 is formed with a reserved hollow part, the hollow part is provided with a knee joint shaft 301, the thigh shell 201 and the two thigh side plate shells 202 are co-installed to form a cavity, and the transmission assembly is set In the cavity of the thigh structure module 2. The whole calf structure module 3 is also in a flat shape, and a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More