A 3d-hevc error hiding method based on virtual viewpoint rendering
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A 3D-HEVC and error concealment technology, applied in the field of viewpoint rendering, can solve problems such as excessive differences, difficulty in restoring the entire frame, and errors, and achieve the effect of improving accuracy and reducing overall complexity
Active Publication Date: 2022-05-10
功智域控科技(苏州)有限公司
View PDF10 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] Aiming at the problems in the prior art that it is difficult to restore the whole frame due to the limitation of the disparity vector and the difference between the average pixel difference and each pixel difference in the moving block due to the joint motion of the image blocks, the present invention proposes a method based on virtual viewpoint rendering The 3D-HEVC error concealment method breaks through the limitations of the disparity vector. Without using the disparity vector, it improves the discrimination and filling method of the occlusion block generated by virtual viewpoint drawing, and improves the accuracy of error concealment while reducing the error rate. Overall complexity, better removal of occluded blocks and image distortion
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
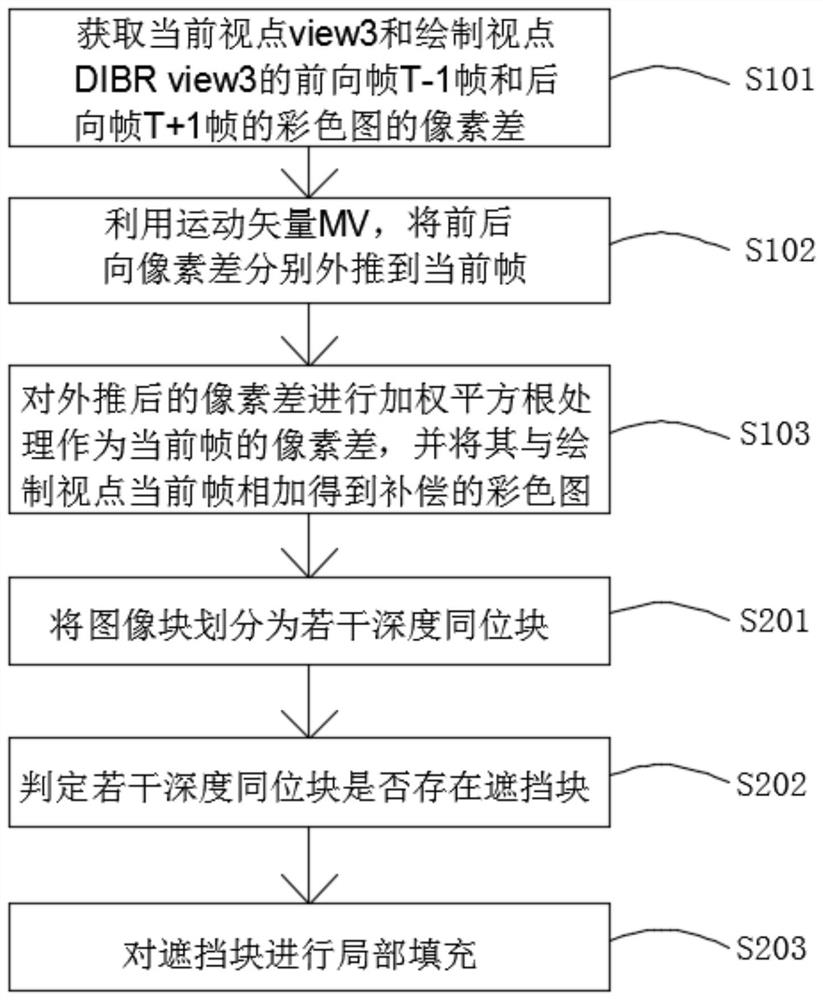
[0047] This embodiment proposes a 3D-HEVC error concealment method based on virtual viewpoint rendering, refer to figure 1 , including the following steps:
[0048] S1, color image compensation, draw the lost full frame color image and generate a drawing viewpoint, because there are occlusion blocks and distortion in the drawing view, according to the information of the current viewpoint and the front and rear reference frames of the drawing viewpoint, the drawn color image is processed compensate;
[0049] Step S1 specifically includes:
[0050] S101. Obtain the pixel difference front_difference (T-1) and back_difference (T+1) of the color images of the forward frame T-1 frame and the backward frame T+1 frame of the current viewpoint view3 and the rendering viewpoint DIBR view3
[0053] The front_difference (T-1) and back_difference (T+1) are introduced in th...
Embodiment 2
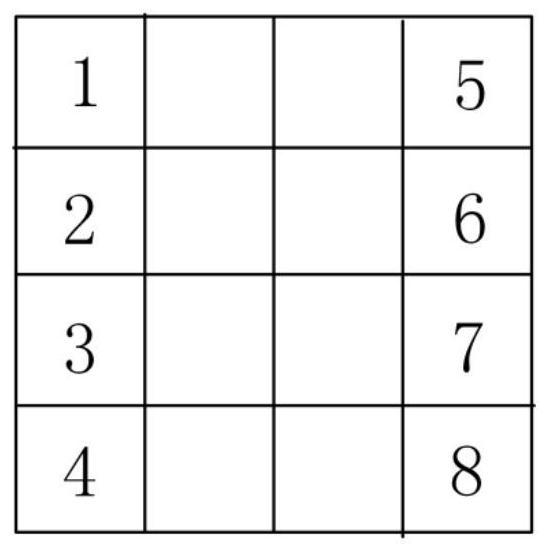
[0079] In this embodiment, on the basis of Embodiment 1, the position of the current viewpoint relative to the adjacent viewpoint is changed to a vertical difference reference image 3 , step S202 to make changes, specifically including the following steps:
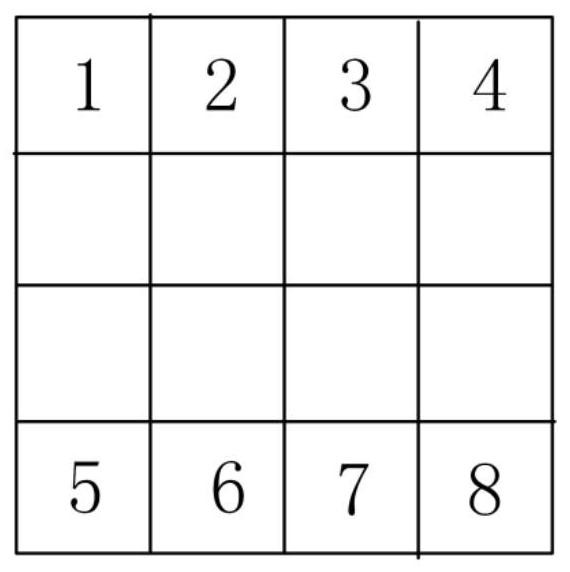
[0080] If block_1-block_2
[0081] Where block_i (i=1, 2, 3, ... 8) is the average pixel value of each block in the 8x8 block, M is the pixel difference threshold, M=25, obtained through image binarization experiments.
[0082] Simultaneously in step S1, utilize motion vector MV, only backward pixel difference is extrapolated to current frame as the total pixel difference of current frame, namely pixel_difference (x, y, T)=back_MVEdifference (x, y, T), make The algorithm is simple...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The present invention proposes a 3D-HEVC error concealment method based on virtual viewpoint rendering, including the following steps: S1, color image compensation, rendering the lost full-frame color image and generating a rendering viewpoint, because there are occlusion blocks and distortions in the rendering view , according to the current viewpoint and the information of the front and rear reference frames of the rendering viewpoint, compensate the drawn color image; S2, determine the occlusion block and perform local filling, extract the compensated color image and still have small occlusion blocks, and perform local filling. The present invention breaks through the limitation of the disparity vector, improves the judgment and filling method of the occlusion block generated by virtual view point drawing without using the disparity vector, and reduces the overall complexity while improving the accuracy of error concealment. The removal of occlusion blocks and image distortion.
Description
technical field [0001] The present invention relates to the technical field of viewpoint rendering, in particular to a 3D-HEVC error concealment method based on virtual viewpoint rendering. Background technique [0002] Video data packets will be lost due to network congestion and routing problems during the transmission of limited bandwidth communication systems, resulting in reduced transmission efficiency. Existing error control methods are aimed at improving error robustness, such as Automatic Repeat Query (ARQ), Forward Error Correction (FEC) and Multiple Description Coding (MDC). Although these methods generally work well at low error rates, their performance degrades as the error rate increases. Another solution to alleviate these problems in the field of image and video transmission is error concealment technology. The error concealment technology is to use the inter-frame and intra-frame compression redundancy of the video stream at the decoding end to hide the er...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More