

A visual robotic arm grasping method and device applied to parametric parts
A parametric, robotic arm technology, applied in the field of visual grasping, which can solve the problems of object models that are difficult to apply to different parts families, and the workload is large.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] Embodiments of the present invention will be described in detail below. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
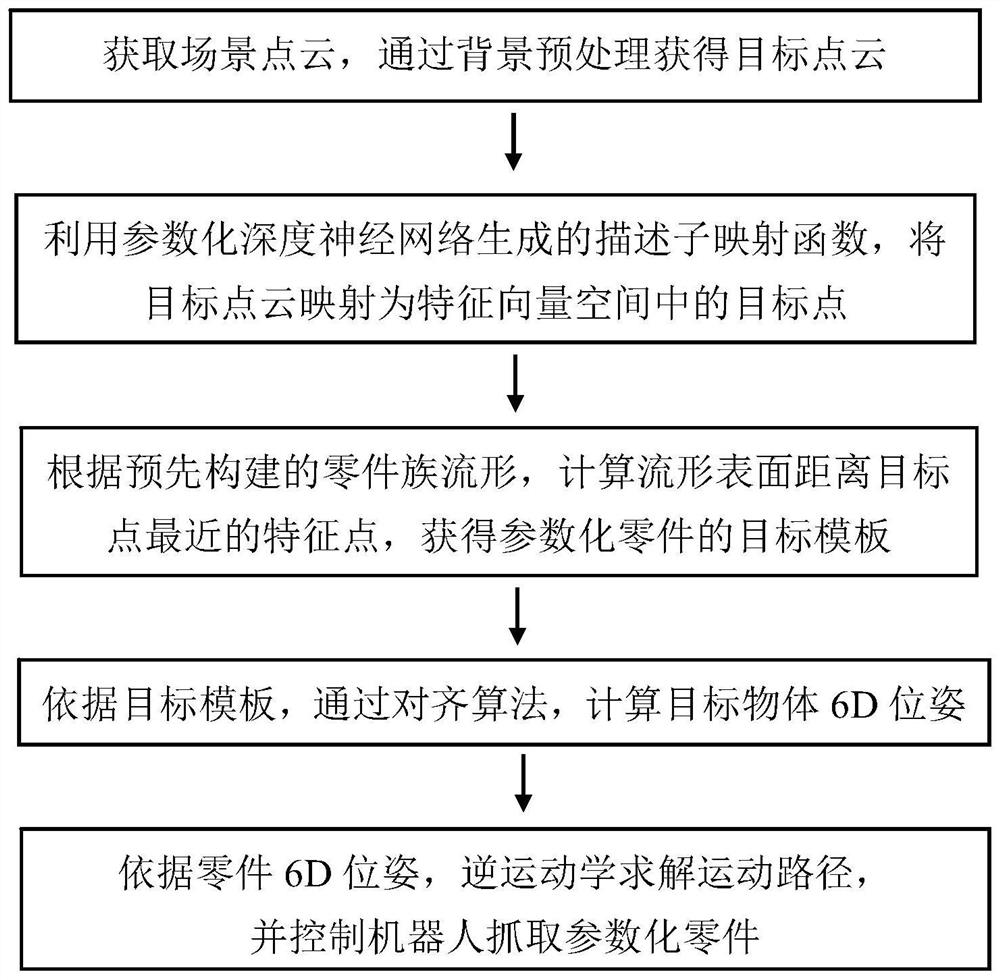
[0050] In the automatic assembly line, it is required to grab various industrial parts from the material box by vision, and place them on the part pose adjuster with roughly correct posture. Industrial parts in real life are basically parametric, that is, they have a unified part template, but the specific size values are different. The embodiment of the present invention realizes the visual robotic arm grasping of parametric parts based on deep learning.
[0051] figure 1 It is a flow chart of a visual manipulator grasping method applied to parametric parts according to an embodiment of the present invention. The visual robotic arm grasping method provided by the embodiment of the present invention can realize the grasping task of parametric parts...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More