

A planning and control method for automatic lane changing of vehicles based on model predictive control
A control method, a technology of vehicle dynamics, applied in the field of autonomous driving motion planning, which can solve problems such as increasing the complexity of optimization problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0110] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, and do not limit the protection scope of the present invention.
[0111] In order to better understand the present invention, an application example of a method for planning and controlling automatic lane changing of vehicles based on model predictive control of the present invention is described in detail below.
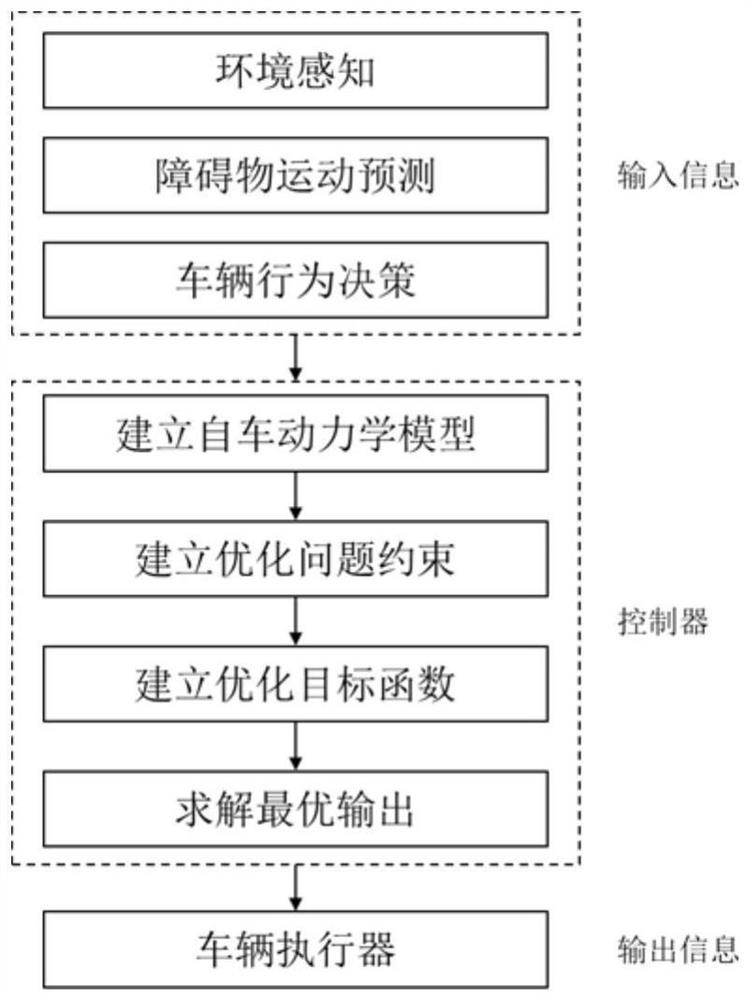
[0112] see figure 1, a vehicle automatic lane changing planning and control method based on model predictive control proposed by the present invention, the input of the method includes the output of the perception system, the obstacle motion prediction algorithm and the vehicle behavior decision. The perception system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More