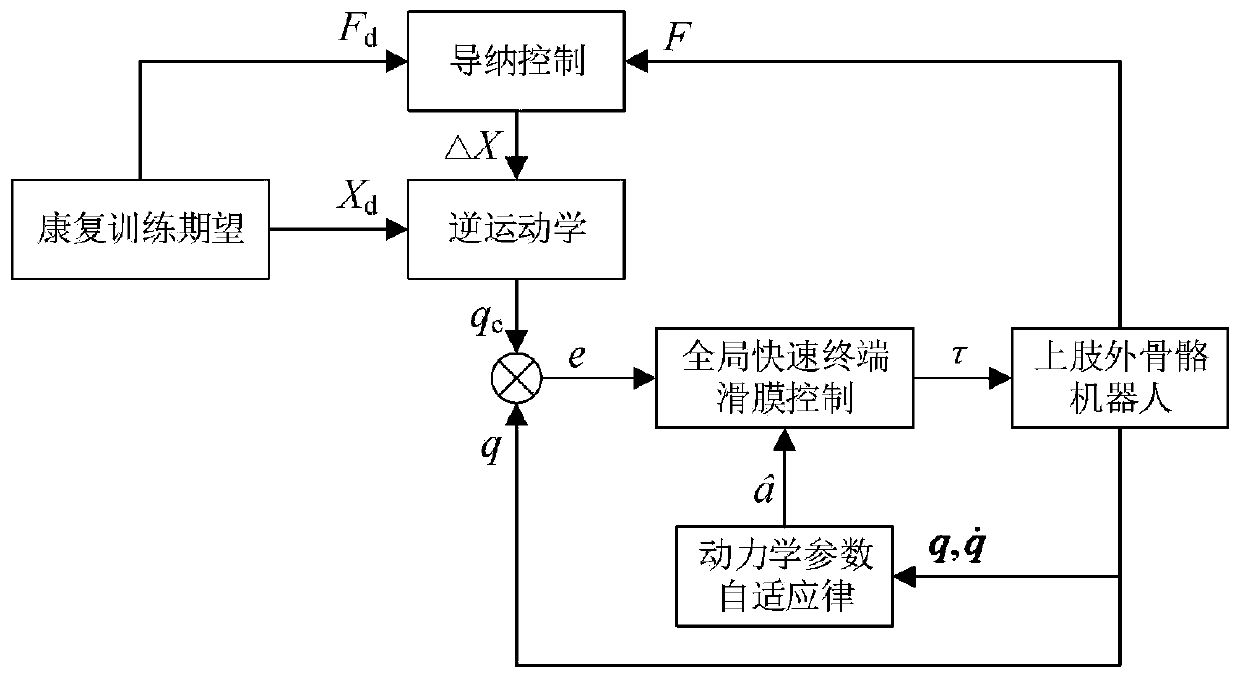
Self-adaptive compliance control method for upper limb rehabilitation exoskeleton robot
An exoskeleton robot, flexible control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as poor adaptability, achieve good real-time performance, high control accuracy, strong robustness and anti-interference ability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
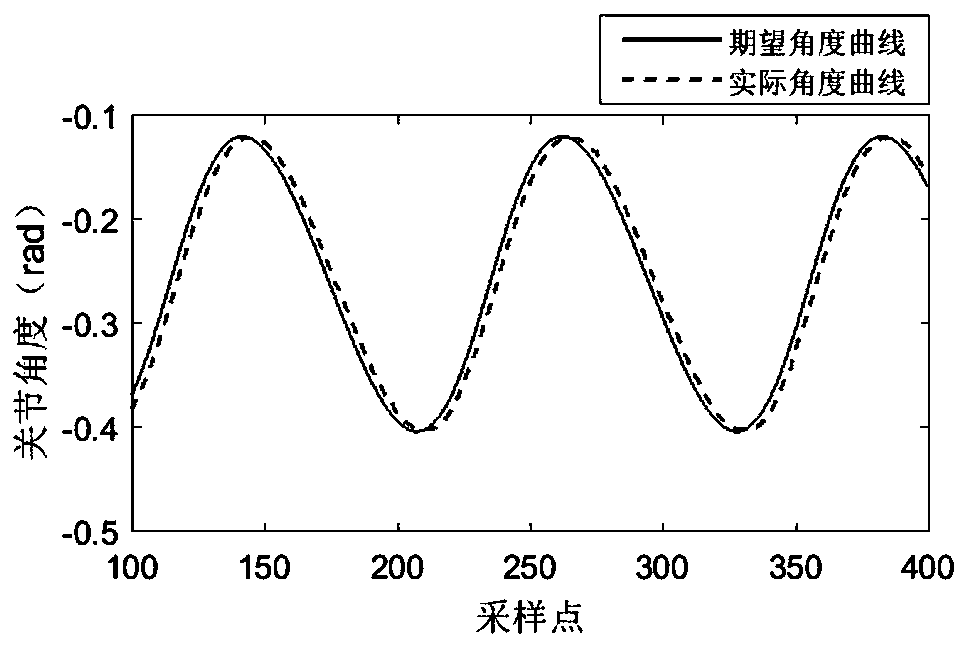
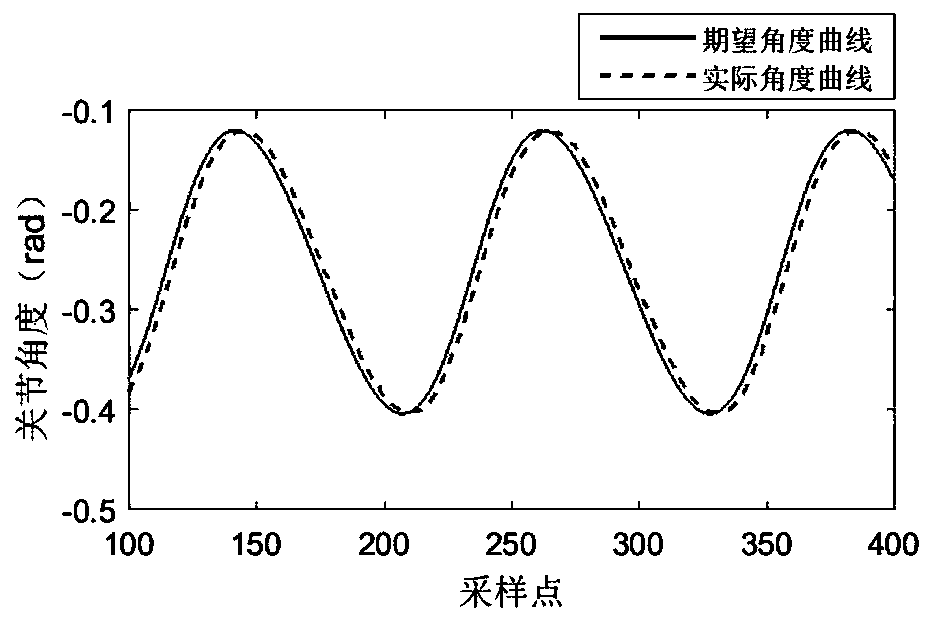
[0112] Use MATLAB / Simulink to carry out the trajectory tracking experiment simulation analysis of the upper limb rehabilitation exoskeleton robot in the passive mode on the adaptive compliant control algorithm. In the embodiment, an adult man with a height of 175cm and a weight of 65kg is used as the analysis object. Inertia parameters of human upper limbs are obtained from the two national standards GB / T10000-88 "Body Size of Adults".
[0113] From figure 2 and image 3 It can be seen that the motion curve of the manipulator is relatively smooth, with good continuity and small hysteresis, and the angle change curve of the two joints is highly coincident with the ideal angle change curve, which proves the stability and good trajectory of the manipulator. Follow performance.
[0114] From Figure 4 and Figure 5 It can be seen that the overall response speed of the joint angle of the controller is faster, the following state is better, and there is no obvious step.
[011...
Embodiment 2
[0117] Using MATLAB / Simulink to carry out the simulation analysis of the trajectory tracking experiment of the upper limb rehabilitation exoskeleton robot in the active mode of the adaptive compliant control algorithm.
[0118] From Figure 7 and Figure 8 It can be seen that the angle in the active mode can basically achieve a certain offset according to the force signal, and realize the adjustment of the trajectory according to the subject's intention, and the effect of soft control is better.
[0119] From Figure 9 and Figure 10 It can be seen that the force sensor detects obvious force changes in the two directions of x and y and responds quickly, and the curve is relatively smooth, and the noise and jitter are very small.
[0120] From Figure 9 — Figure 12 It can be seen from the figure that the deviation of the actual angle from the expected angle is consistent with the change trend of the interaction force data curve.
[0121] Figure 13 Shown is the paramete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com