

Compass and robot path recording method
A compass and robot technology, applied in the field of robot detection, can solve the problems of inability to calculate the path of detection, affecting the effect of terrain detection, and high manufacturing cost, and achieve the effect of simple overall structure, low cost and less calculation amount.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
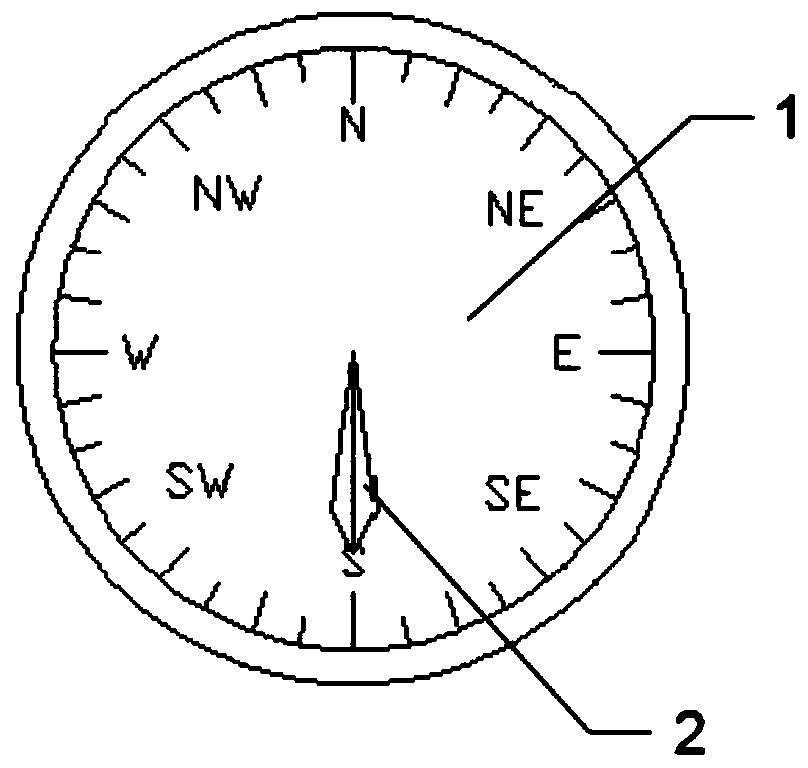
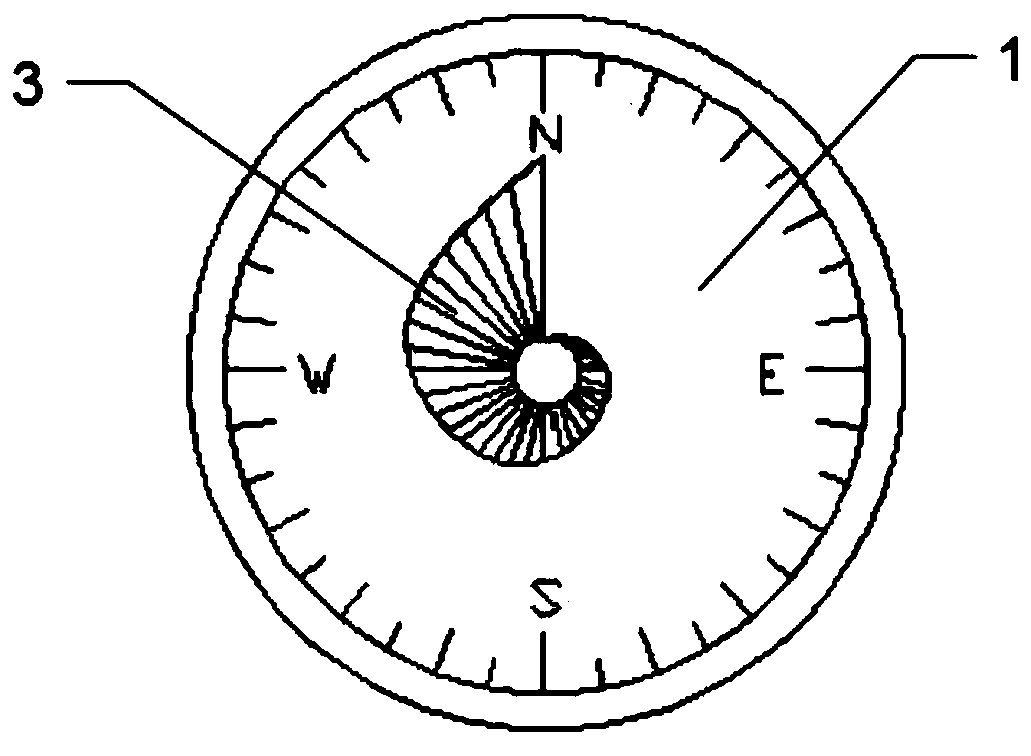
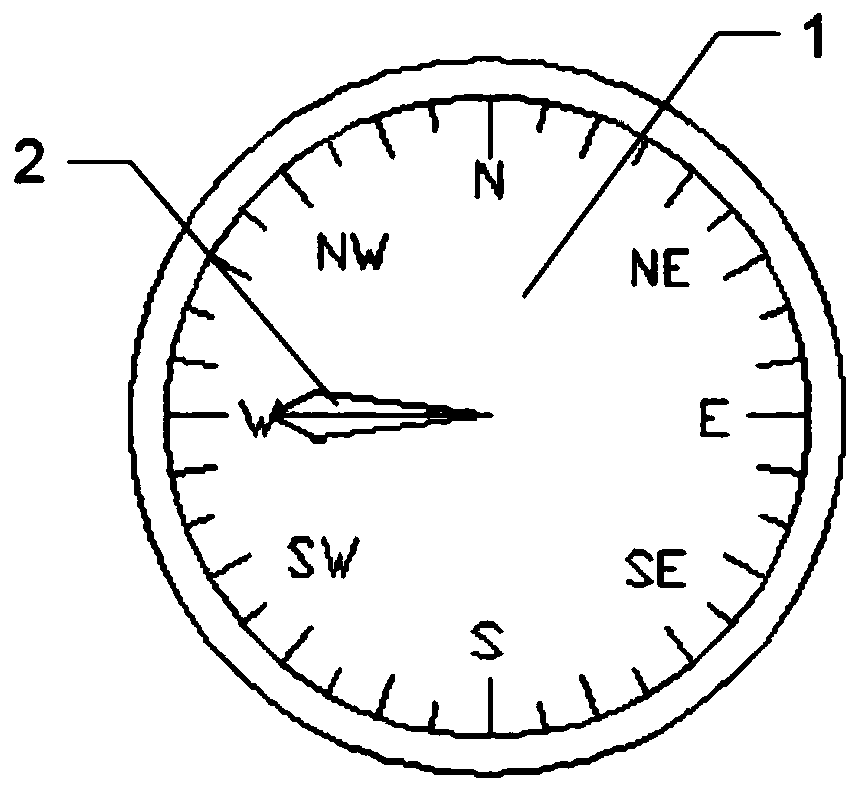
[0023] Refer to attached Figure 1-3 , this embodiment includes a fuselage body 1, the fuselage body 1 is provided with a pointer 2 and a capacitor unit 3, the capacitor unit 3 is arranged below the pointer 2, the pointer 2 rotates along the axis of the fuselage body 1, and the capacitor unit 3 is arranged on the fuselage The lengths of the body 1 in the radial direction are different, and the capacitor unit 3 and the pointer 2 form a capacitor, so that the pointer 2 has different accommodation at different angles.
[0024] Pointer 2 guides or points north. In this embodiment, pointer 2 always po...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Radius | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More