

Dot-line feature selection method and system for binocular vision SLAM
A feature selection and binocular vision technology, applied in the field of computer vision, can solve problems such as spatial structure information and distribution information considerations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0101] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
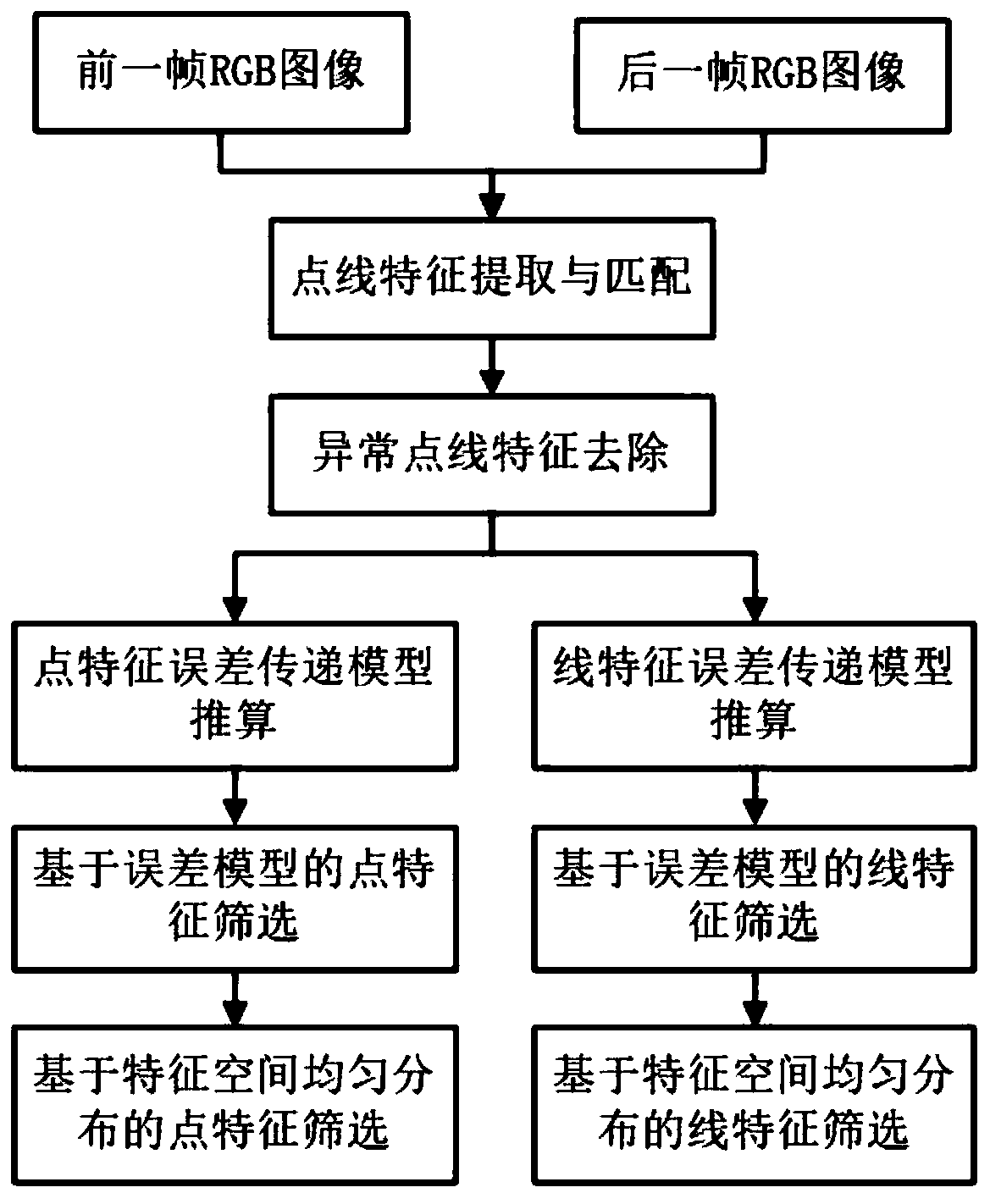
[0102] Such as figure 1 As shown, in this embodiment, a method for selecting point-line features for binocular vision SLAM according to the present invention includes any one or more steps as follows:
[0103] The removal of abnormal point and line features based on RANSAC is denoted as step S1, specifically: first randomly extract a certain proportion of point and line feature matching pairs, solve the relative poses of the front and rear frames, and then obtain the set of interior points under the pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More