Mobile mechanical arm position/force active disturbance rejection control method based on adaptive algorithm
A technology of mobile manipulators and self-adaptive algorithms, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficult real-time adjustment of algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
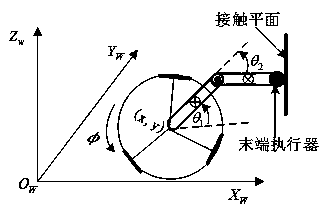
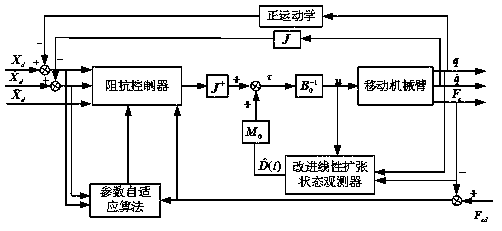
[0112] The structural block diagram of the control system designed by the present invention is as follows figure 2 shown. In order to verify the validity of the control algorithm designed by the present invention, MATLAB is used as the simulation platform to move the mechanical arm in all directions with two links with 5 degrees of freedom ( figure 1 shown) for the control object to verify the control simulation experiment of the position / force of the mobile manipulator. The following describes in detail the method for controlling the position / force of the mobile manipulator under the condition of uncertainty in the external environment of the present invention in conjunction with the simulation experiment and the accompanying drawings.
[0113] Aiming at the control problem of the position / force of the omnidirectional moving manipulator under the condition of uncertain external environment, the present invention designs an impedance parameter adaptive algorithm by using the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More