Collision detection mechanical arm path planning method based on improved ant colony algorithm
A technology of collision detection and ant colony algorithm, which is applied in the field of path planning of collision detection manipulators, which can solve the problems of high safety factor, difficulty in taking into account different indicators at the same time, and complex obstacle avoidance paths.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] Below in conjunction with specific embodiment, further illustrate the present invention.
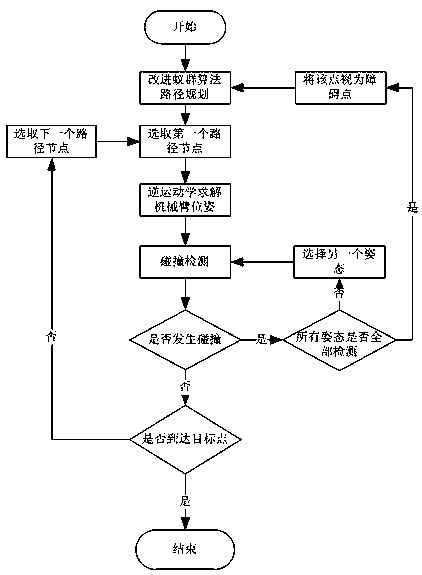
[0082] The invention mainly relates to the field of kinematics control and planning of a manipulator, and aims to solve the problems of slow convergence speed and unreasonable number of paths in the traditional manipulator path planning ant colony algorithm. The path planning method of the manipulator of the present invention mainly includes the following steps:
[0083] Step 1: Carry out the kinematics analysis of the manipulator according to the established manipulator model, and complete the kinematics inverse solution of the space manipulator by modifying the Schmidt QR decomposition inversion method. The specific solution method includes the following steps:
[0084] Step 1.1: According to the D-H method, determine the transformation matrix between two adjacent connecting rods i and i+1:
[0085]
[0086] Among them, i represents the number of the rod, θ represents the j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com