

Rotary clamping system of mechanical gripper
A mechanical gripper and rotating fixture technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of vibration of the structure, less translational applications, and influence on the stability of the structure, so as to achieve uniform contact force and stable clamping of objects. , the effect of reliable work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
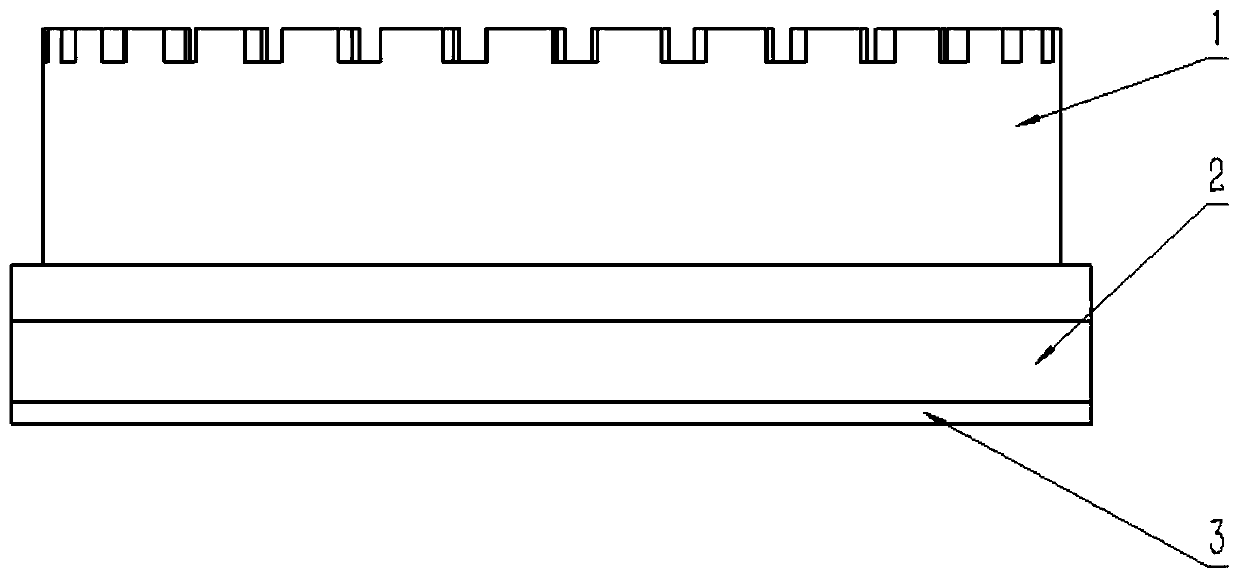
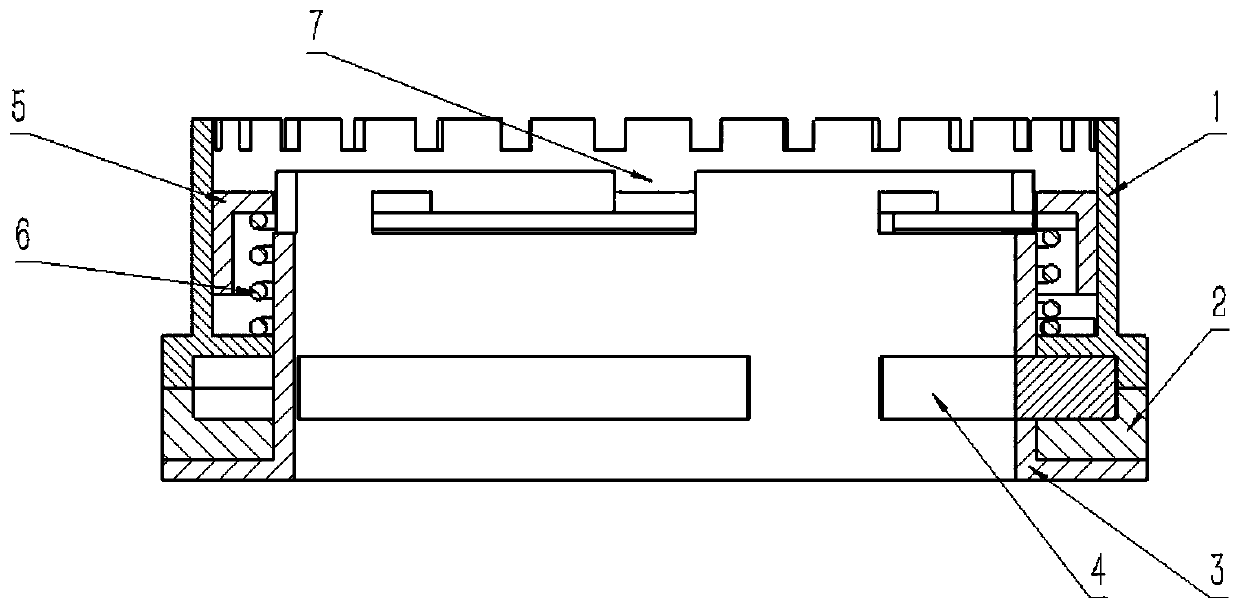
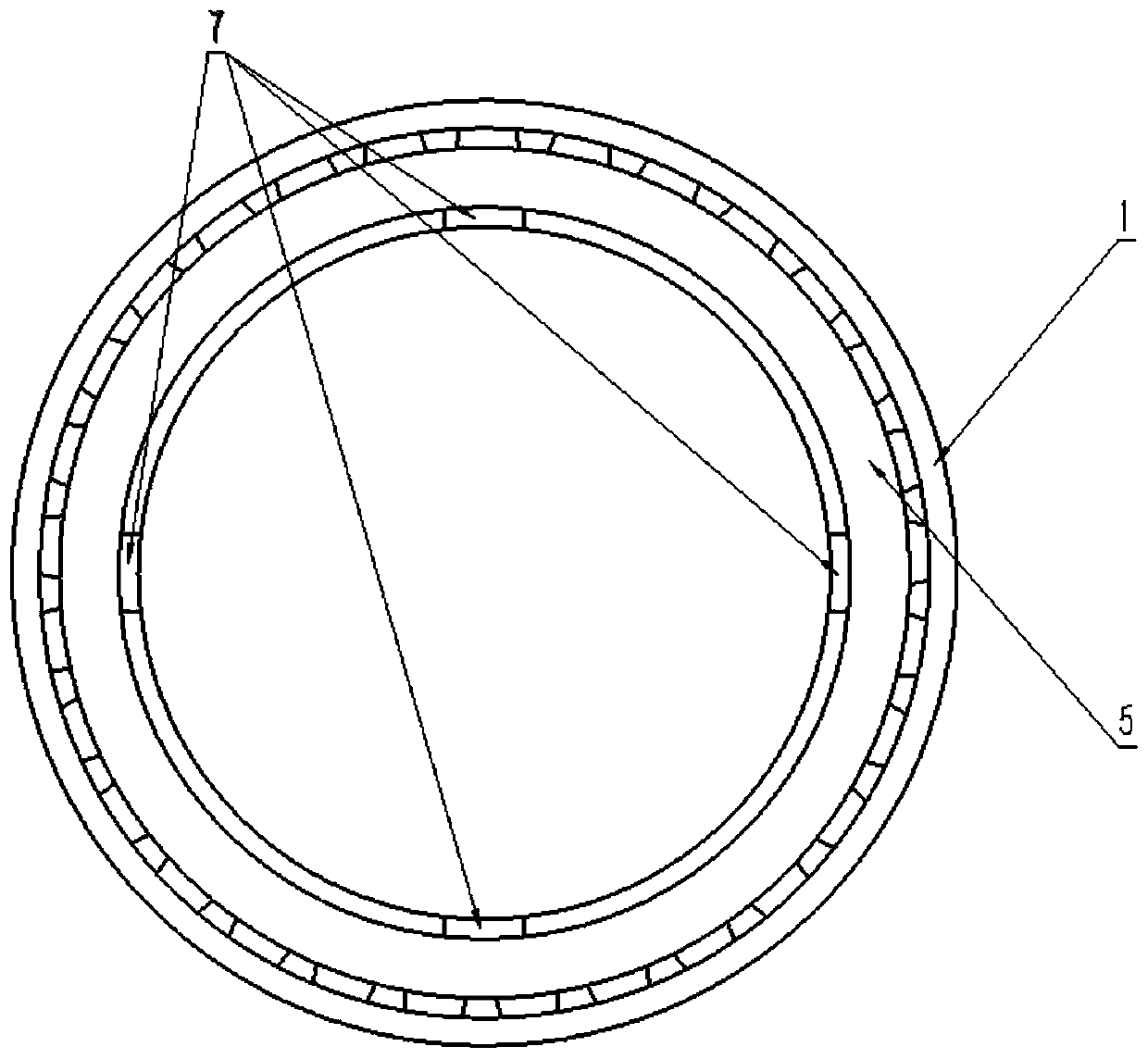
[0032] The present invention will be further described below in conjunction with the accompanying drawings. Such as Figure 1-8 As shown, a rotary clamping system of a mechanical gripper includes a rotary clamping device 14 and a power device 12, the hollow main shaft 3 of the rotary clamping device 14 is rigidly connected to the front end of the mechanical arm 15, and the power device 12 is installed At the oblique rear of the rotating clamping device 14 and on the side of the head end of the mechanical arm 15, the output shaft of the power device 12 is connected to the intermittent gear 13; the intermittent gear 13 is engaged with the rotating housing 1 to drive the rotating housing 1 to rotate;
[0033] The rotating clamping device 14 includes a hollow main shaft 3, a high-strength spring 6, a rotating clamp 4, a clamp installation sleeve 2, a tail cover 5 and a rotating housing 1. The head of the hollow main shaft 3 is a flange, and the tail is a circle. The high-strength...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More