

Torsional spring type assisting joint and assisting walking robot
A technology of joints and torsion springs, which is applied in the field of torsion spring-type power-assisted joints and walking-assisted robots, which can solve problems such as complex structures, comfort discounts, and self-heavy power-assisted joints, and achieve broad market prospects, simple and light structure, and comfortable wearing Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
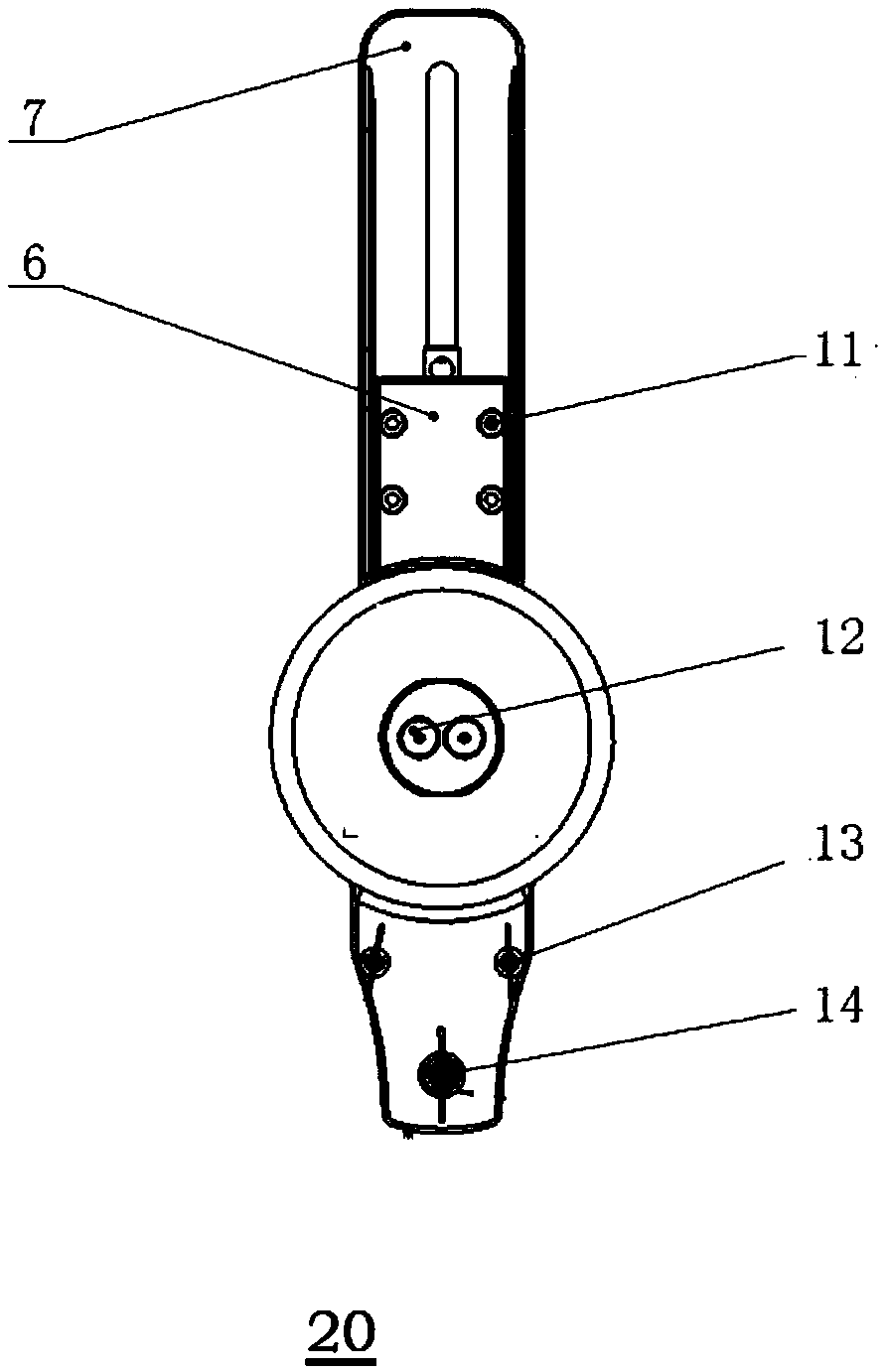
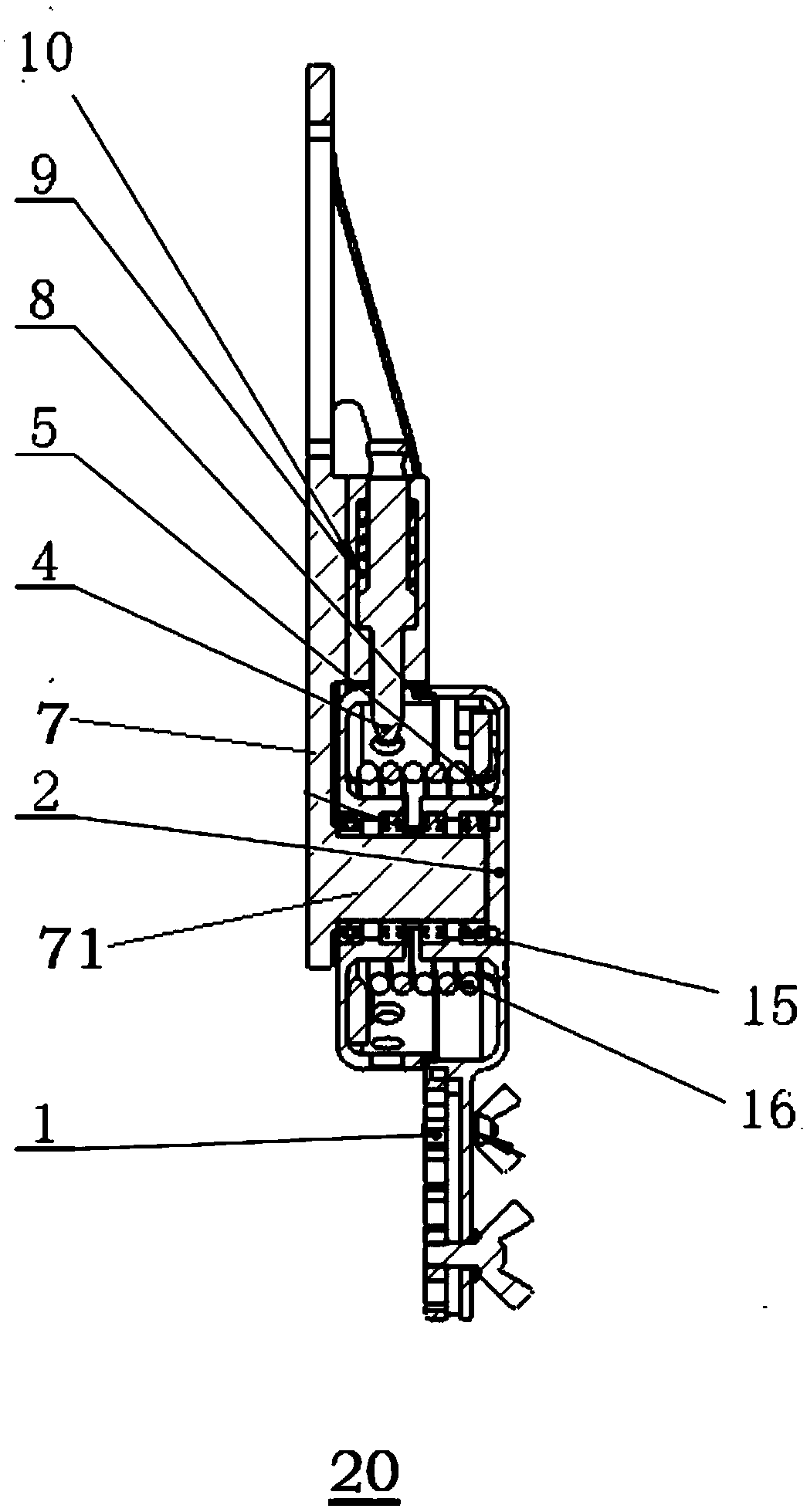
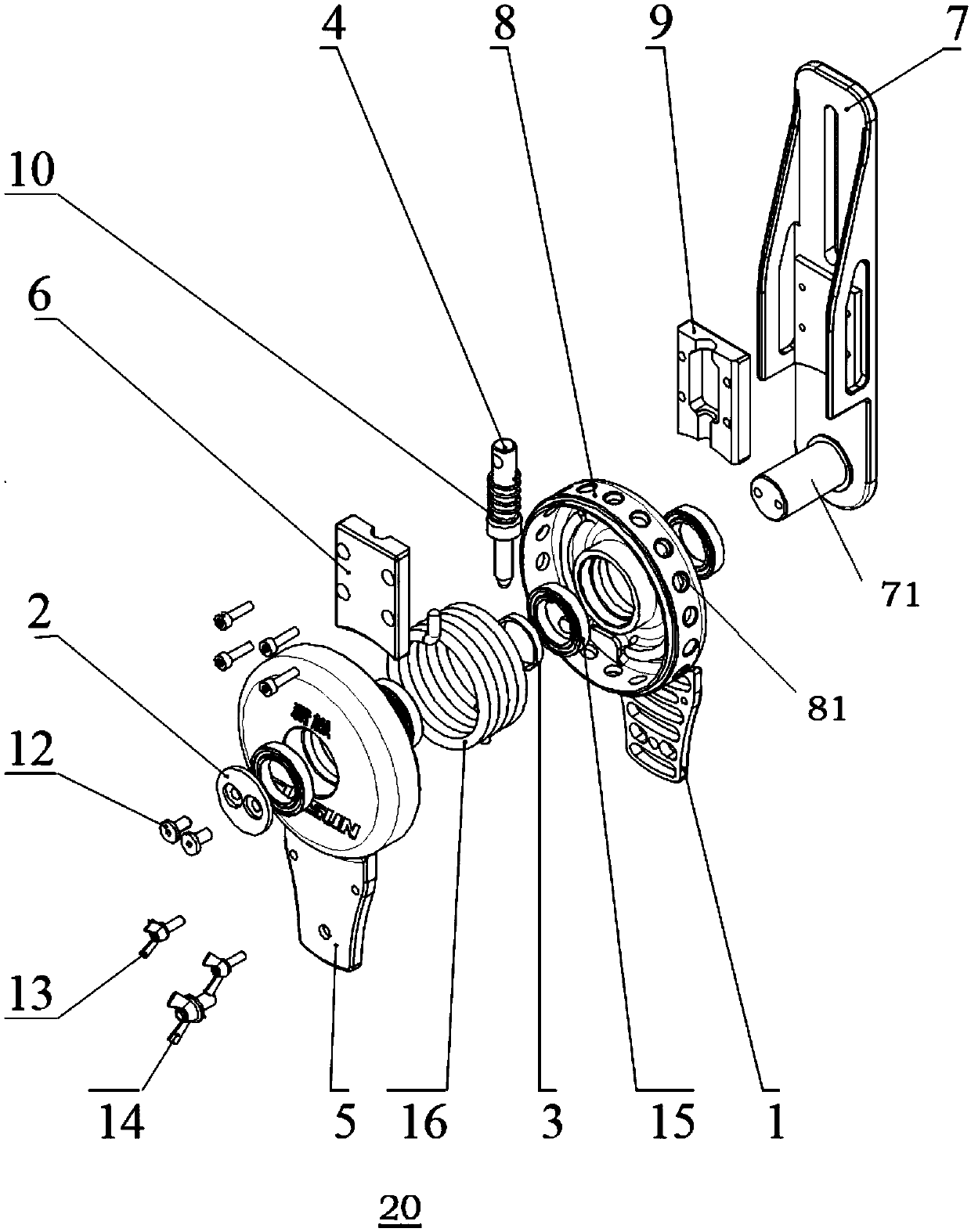
[0029] refer to Figure 1 to Figure 3 As shown, a torsion spring type power-assisted joint 20 according to an embodiment of the present invention is schematically shown. The torsion spring type power-assisted joint 20 includes: an elastic drive device 16, a drive device shell, a waist fixing device and a circumferential fixing device;
[0030] The elastic driving device 16 is arranged in the housing of the driving device;
[0031] The drive device housing includes a joint outer cover 5 and a joint inner cover 8. One end of the elastic drive device 16 is arranged on the joint outer co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More