

Positioning method based on laser radar and IMU tight coupling
A lidar and tightly coupled technology, applied in surveying and navigation, reradiation of electromagnetic waves, measurement devices, etc., can solve problems such as large amount of calculation and failure of point cloud matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
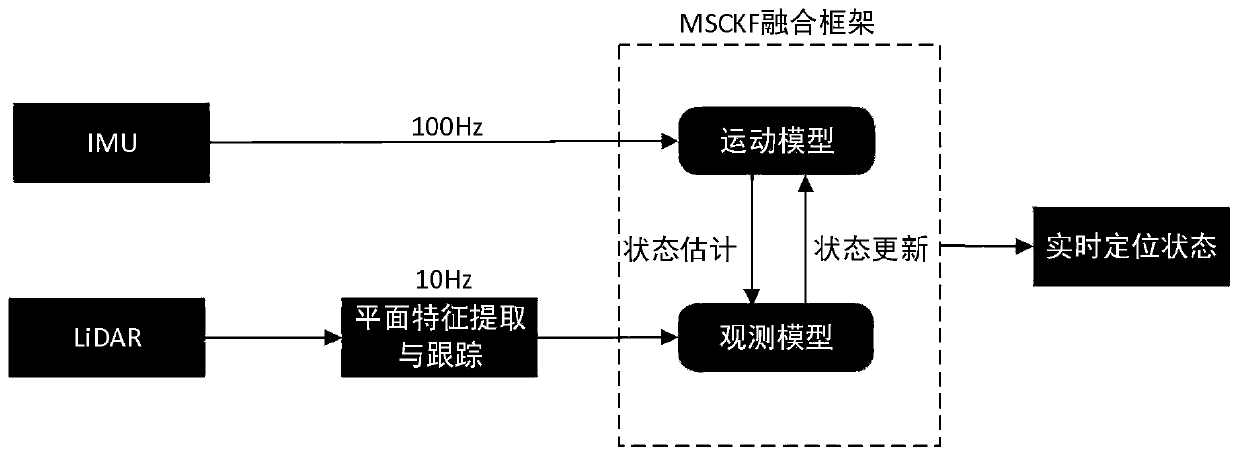
[0034] Such as figure 1 As shown, the present invention is based on the robot localization method of lidar and IMU tight coupling, comprises the following steps:
[0035] S1. Read the output data of the IMU, and estimate the real-time motion state of the system through the motion model.
[0036] The motion state of the system includes at least the robot's position, orientation, and speed information, and maintains a fixed-size sliding window about the lidar pose. The sliding window stores the latest m laser radar positions, orientations, and other information in the robot's trajectory. . The IMU outputs acceleration and angular velocity data at a frequency of 100 Hz, estimates the motion state of the system according to the motion model of the IMU, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More