

Laser SLAM loopback detection system and method based on graph descriptor
A detection system and descriptor technology, applied in image enhancement, image analysis, image data processing, etc., can solve the problem that the real-time performance of detection loopback is difficult to meet the actual use requirements, and achieves the task of avoiding normal vector calculation, fast and robust. Detect loopback and avoid the effect of large changes in viewing angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
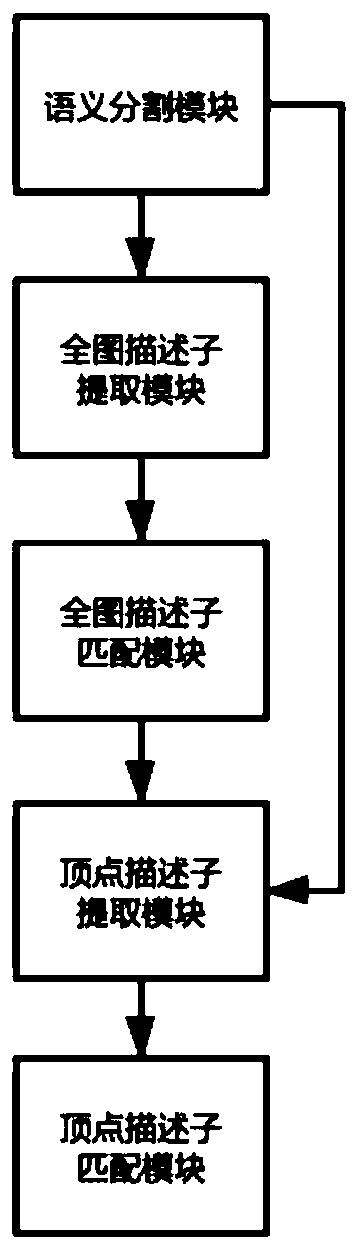
[0030] like figure 1 As shown, a laser SLAM loop closure detection system based on graph descriptors, including semantic segmentation module, whole graph descriptor extraction module, whole graph descriptor matching module, vertex descriptor extraction module, vertex descriptor matching module and geometric consistency Authentication module, where:
[0031] Semantic segmentation module: used to perceive the external environment, extract the semantic object information in the unordered point cloud data, obtain the prediction confidence of the object and the three-dimensional space coordinates of its center of mass, and output it to the whole image descriptor extraction module and the vertex descriptor extraction module;
[0032] Full Graph Descriptor Extraction Module: It is used to take the centroid of the object in the point cloud data as the vertex, and the Euclidean distance between the vertex and the vertex as the edge to form a complete graph, and store all the edges in t...
Embodiment 2
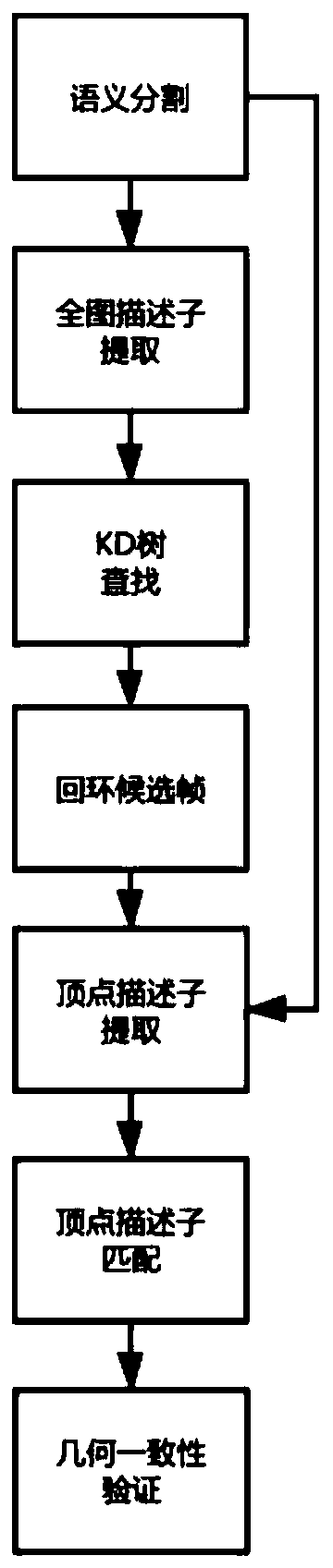
[0044] like figure 2As shown, the present invention also provides a laser SLAM loopback detection method based on graph descriptors, which includes the following steps. The application scene of this method is an indoor and outdoor scene with rich semantic information:
[0045] S1. Use the point cloud data scanned by the lidar as the input of the PointRCNN or SECOND neural network to obtain the prediction confidence and spatial position of the semantic object;
[0046] S2. Using the spatial position of each object, taking the object as the vertex and the Euclidean distance between the objects as the edge to form a complete graph, store all the edges in the complete graph into a one-dimensional counting vector according to their length, and obtain the complete graph graph descriptor;
[0047] S3. Add the full-image descriptor of the query frame to the KD tree with historical frame data, use the nearest neighbor algorithm to find n historical frames similar to the query frame, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More