

Wheel-leg composite type robot moving device and wheel-leg composite type robot
A mobile device and composite technology, applied in the field of robots, can solve the problem of a large number of joints in a wheel-leg mobile device, and achieve the effects of fast and convenient mode switching, simple control, and improved structural strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
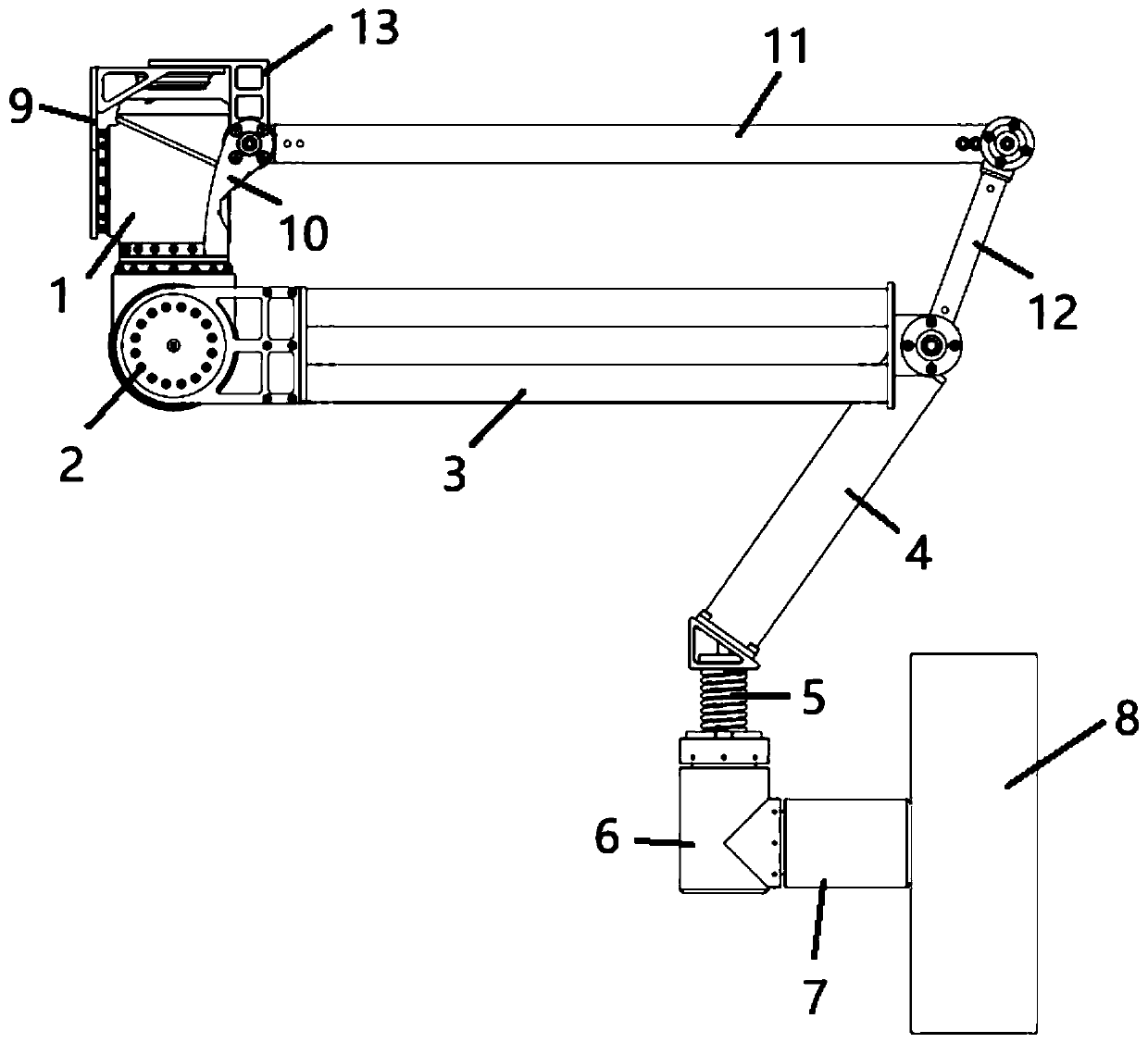
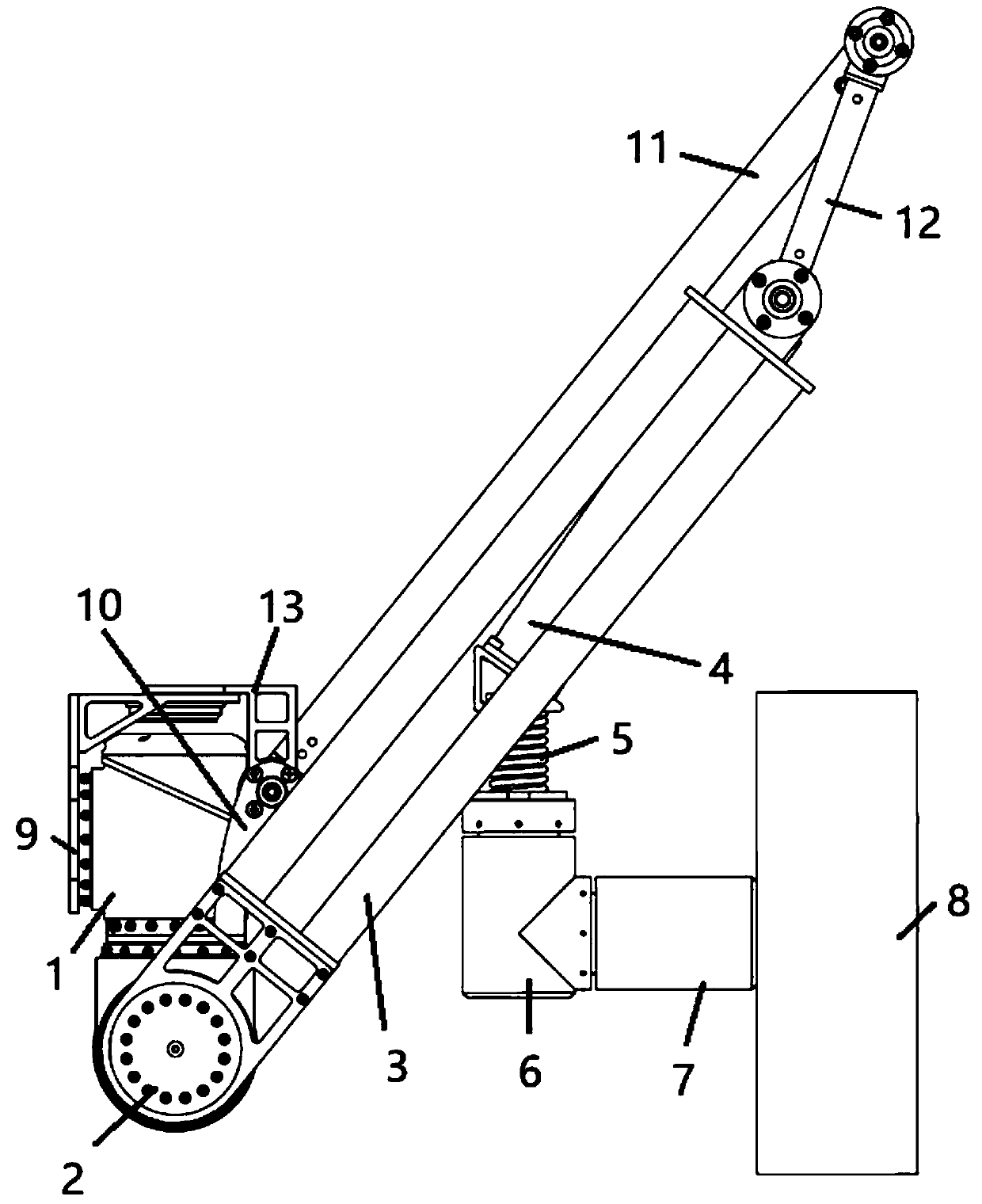
[0058] see Figure 1 to Figure 4 , the present embodiment provides a wheel-leg compound robot mobile device, comprising a hip joint, a hip joint driver, a leg comprising at least one first rod 3 and at least one second rod 4, an ankle joint driver, a wheel Drives and wheels 8. The hip joint part comprises the hip joint driver and the installation part 9 for connecting the robot body 14, the hip joint driver is connected with the installation part 9; the output end of the hip joint driver is connected with the hip joint driver, and the hip joint driver is used for The hip joint driver is driven to rotate around the axis of the output end of the hip joint driver. The output end of the hip joint driving part is connected with the first end of the first rod 3, and the hip joint driving part is used to drive the first rod 3 to rotate around the axis of the output end of the hip joint driving part. The second end of the first rod 3 is rotatably connected with the first end of the ...
Embodiment 2
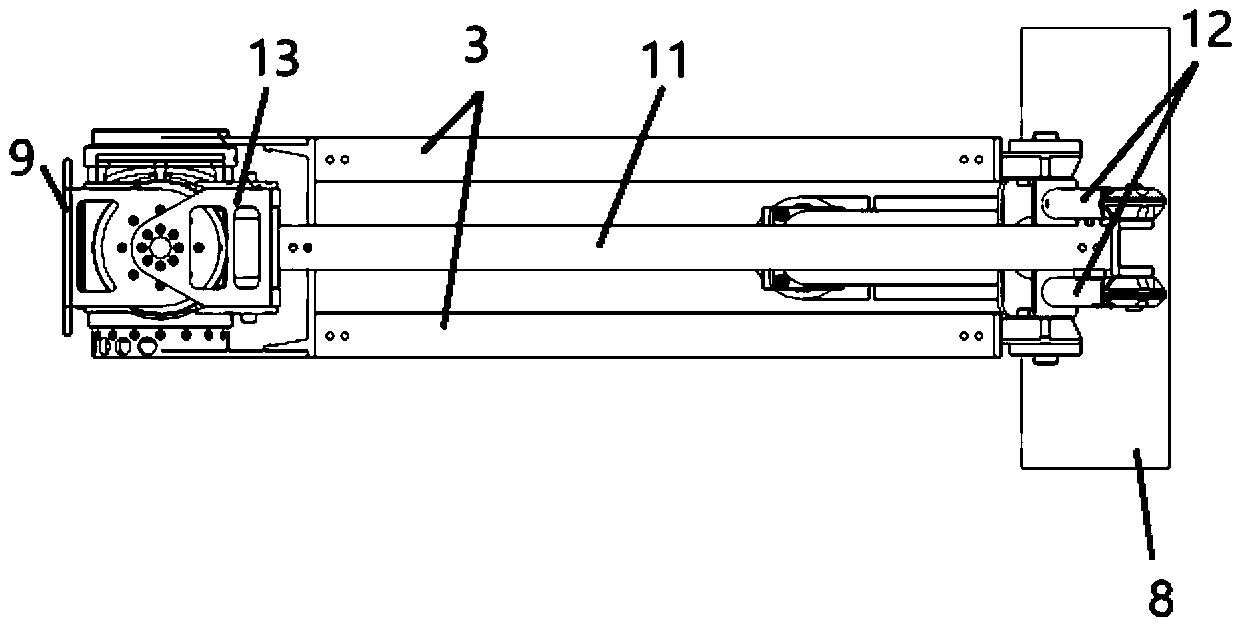
[0073] see Figure 1 to Figure 3 , this embodiment provides a wheel-leg compound robot mobile device, on the basis of Embodiment 1, the legs are improved.
[0074] On the basis of Embodiment 1, the legs further include at least one support rod 10 , at least one parallel rod 11 and at least one connecting rod 12 . One end of the support rod 10 is connected to the hip joint driver, and the other end is rotatably connected to the first end of the parallel rod 11 . One end of the connecting rod 12 is connected with the first end of the second rod 4, and the other end is rotatably connected with the second end of the parallel rod 11; connect. The support rod 10 and the hip joint driver form a parallelogram four-bar linkage together with the first rod 3 , the connecting rod 12 and the parallel rod 11 .
[0075] Specifically, the above-mentioned rotational connections can all be connected through bearings. The support rod 10 and the hip joint motor 2 together with the first rod 3...
Embodiment 3
[0081] see Figure 5 to Figure 7 , this embodiment provides a wheel-leg compound robot, which is equipped with any one of the wheel-leg compound robot moving devices in Embodiment 1 or Embodiment 2 through the mounting member 9 .
[0082] 4, 6 or 8 wheel-leg compound mobile devices can be selected on each wheel-leg compound robot. The wheel-leg compound robot can realize leg-type multi-gait movement, wheel-type movement and wheel-leg Compound sports, with efficient mobility and ability to pass through complex terrain.
[0083] The wheel-leg compound robot provided in this embodiment is equipped with six wheel-leg compound robot moving devices evenly distributed on the peripheral side of the body 14 . When the wheel-leg compound robot is performing wheeled motion, the wheels 8 in the 6 wheel-leg compound robot moving devices all contact the traveling surface (such as the ground, the surface of the moon, etc.), and the 6 wheels advance toward a square simultaneously. When the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More