

A local path planning method for intelligent vehicles based on improved a* algorithm and morphin algorithm
A technology for local path planning and smart cars, which is used in surveying and navigation, road network navigators, navigation and other directions. Improve the planning speed and efficiency, reduce the amount of calculation, and improve the effect of planning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
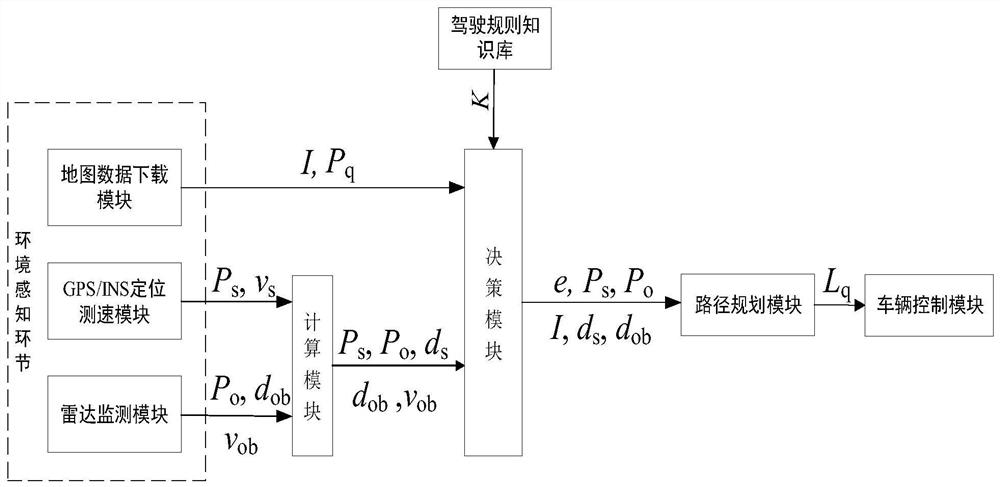
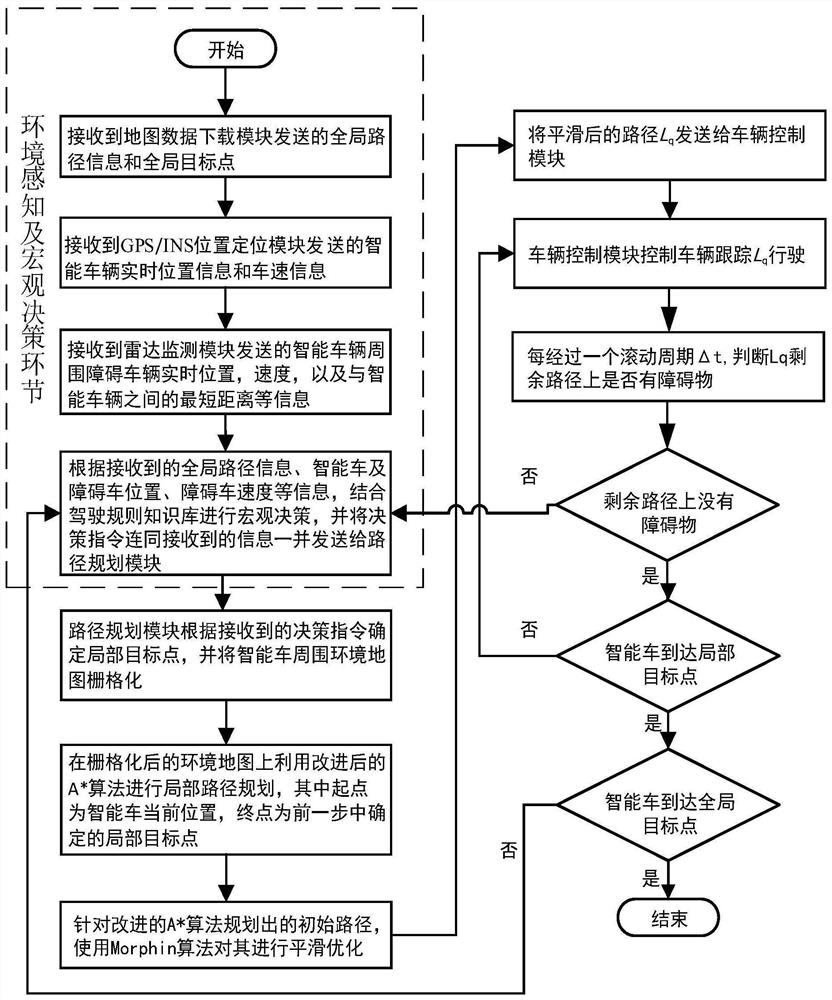
[0030] Such as figure 1 and figure 2 Shown, the present invention is based on the realization of the intelligent vehicle local route planning method of improved A* algorithm and Morphin algorithm based on figure 1 The hardware structure shown includes a map data download module, a GPS / INS positioning and speed measurement module, a radar monitoring module, a calculation module, a driving rule knowledge base, a decision-making module, a path planning module and a vehicle control module. Among them, the map data download module, GPS / INS positioning speed measurement module and radar monitoring module form the environmental perception link. The output end of the map data download module and the driving rule knowledge base is connected to the input end of the decision-making module, the output end of the GPS / INS positioning speed measurement module and the radar monitoring module are connected to the input end of the calculation module, and the output end of the calculation mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More