

Robot time optimal trajectory planning method
A time-optimized and trajectory planning technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of poor applicability of trajectory planning methods, reduce the acceleration process time, improve calculation efficiency, The effect of guaranteeing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
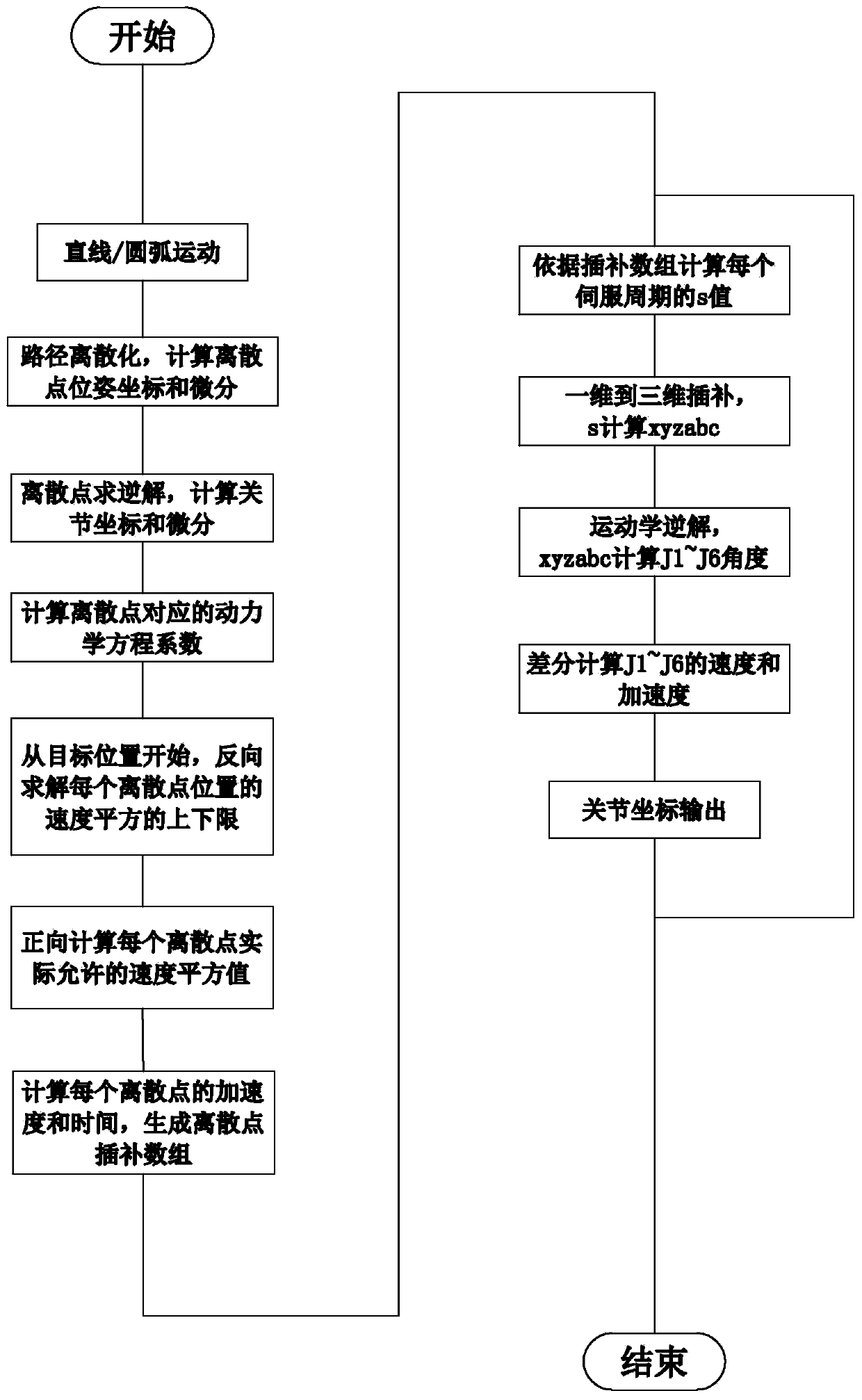
[0059] The robot moves in Cartesian space, and according to the joint space angular velocity, joint space moment, Cartesian space linear velocity and Cartesian space angular velocity are selected as constraints in the motion constraint set, this robot time optimal trajectory planning method includes:
[0060] Create a sequence of discrete point lengths s k : First obtain the task path, calculate the path length s and determine the relationship between the main axis and the slave axis of the robot's position motion and attitude motion, perform equidistant dispersion on the task path, generate several discrete points, and obtain the Cartesian coordinates of the discrete points; where s k =[s 1 ,...s k ...,s N ], k∈[1,2,…,N], k is the discrete point number;
[0061] A. Obtain kinematic parameters: For Cartesian space motion, determine the Cartesian position of the robot. The Cartesian position includes: position information and attitude information based on the coordinate syst...
Embodiment 2
[0172] The difference between this embodiment and the structure and principle of Embodiment 1 is that:
[0173] (1) The motion of the robot is joint space motion. In step A, obtaining joint information, the primary differential s’ is obtained by performing differential calculations on the path length s for each discrete point k with the second differential s" k , for joint space motion, there is no need to solve Cartesian coordinates, and it is not necessary to use kinematics inverse solution for coordinate mapping. according to s k , s' k ,s" k Carry out the calculation of the joint movement displacement q, and the differential calculation of the displacement q with respect to the path length s, and obtain the first differential qs' and the second differential qs", where q is the joint angle, qs' is the joint angular velocity, and qs" is the joint angular acceleration .
[0174] (2) In the motion constraint set, only joint space angular velocity and joint space torque ar...
Embodiment 3
[0176] The structure and principle of this embodiment are basically the same as those of the first embodiment, except that the joint torque in the constraints is replaced by the joint angular acceleration.
[0177] Suppose the joint angular acceleration of the manipulator in a certain trajectory is And the maximum angular acceleration of the joint is a given value. The minimum angular acceleration is the opposite number of the maximum angular acceleration, and the angular acceleration constraint of the manipulator joint is:
[0178]
[0179] Among them, A j,max is the maximum angular acceleration of the robot joint, A j,min is the minimum angular acceleration of the robot joint.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More