

Lightweight four-degree-of-freedom leg mechanism of four-foot bionic robot
A technology of bionic robot and leg mechanism, which is applied in manipulators, motor vehicles, program-controlled manipulators, etc. It can solve the problems of poor dynamic response speed, limited motion accuracy and response speed, long connecting pipelines, etc., and achieve action response Fast, easy and precise measurement, strong load resistance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
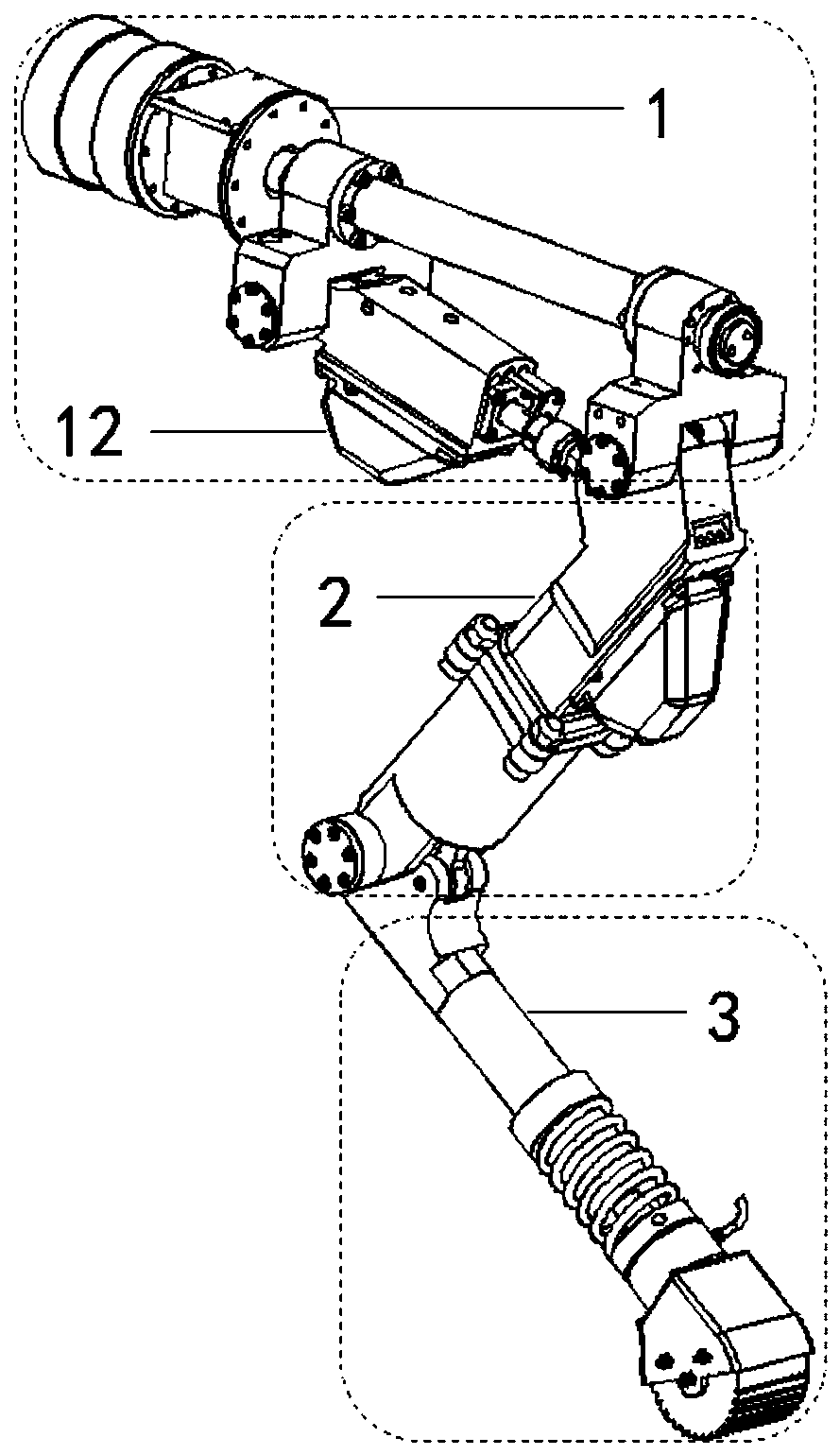
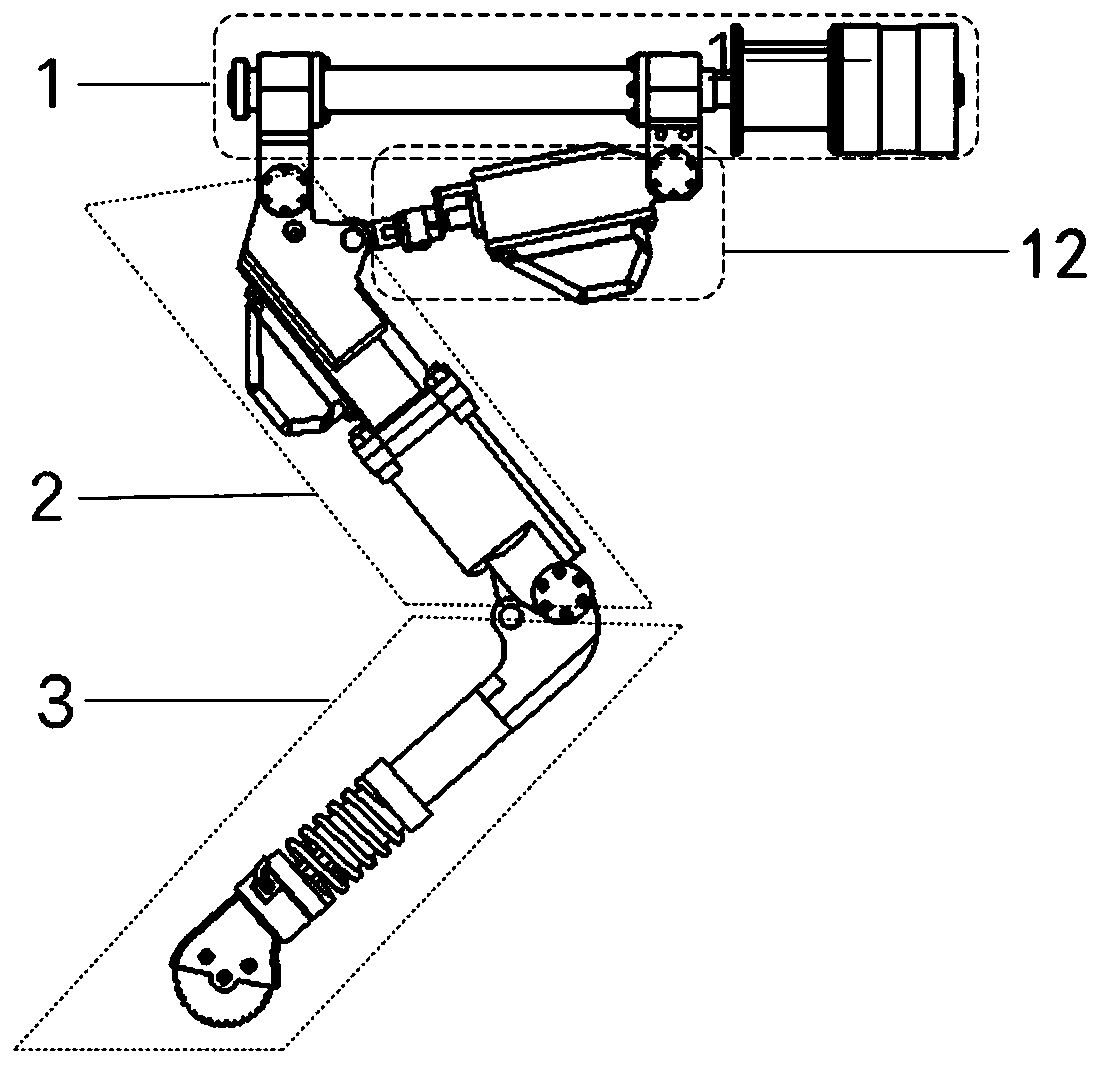
[0032] The purpose of the present invention is to provide a light-weight four-degree-of-freedom leg mechanism of a quadruped bionic robot to solve the problems existing in the prior art, so that the leg mechanism can achieve highly integrated lightweight without external hydraulic pipelines, and the legs can be lifted Institutional flexibility.
[0033] In order to make the above objects, features and advantages of the present invention more comprehensible, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More