

Floor sweeping robot capable of climbing stairs and working method thereof
A technology for sweeping robots and climbing stairs, applied in the field of sweeping robots, can solve the problems of increasing labor intensity, unable to clean debris, reducing the intelligence and cleaning efficiency of sweeping robots, etc., to achieve the effect of improving cleaning efficiency and improving intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
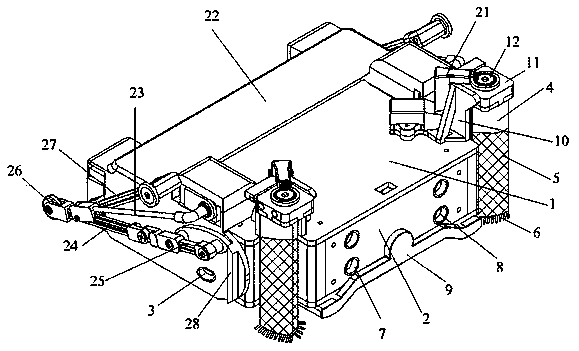
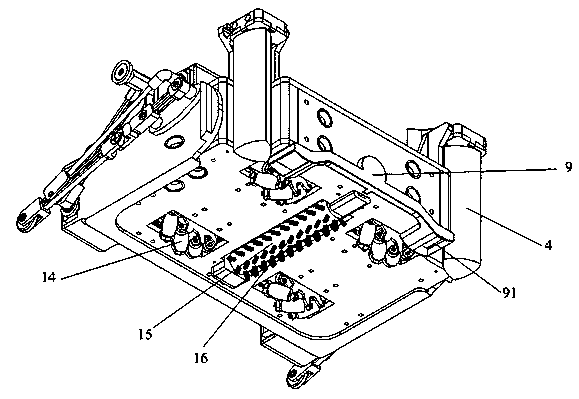
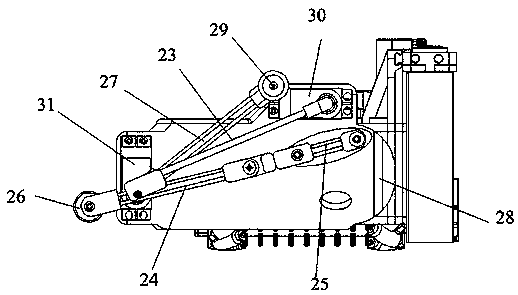
[0067] as attached figure 1 to attach Figure 7 As shown, a sweeping robot that can climb stairs includes a body 2, a cleaning mechanism and a walking mechanism. The body 2 includes a top cover 1 and a base. The walking mechanism includes a plurality of walking components installed at the bottom of the body 2, and a ladder climbing mechanism. The sweeping robot ladder mechanism is installed on the sweeping robot body 2 through the housing 22;
[0068] The sweeping robot ladder mechanism includes two sets of ladder systems respectively arranged on the front and rear sides of the sweeping robot body 2. The sweeping robot ladder system includes a front support rod assembly and a rear support rod assembly. The front support rod assembly of the sweeping robot includes a first driver 30, a first The support rod 23, the second support rod 24 and the third su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More