

An end-to-end method for high-precision shape modeling of industrial parts
A modeling method and high-precision technology, applied in neural learning methods, biological neural network models, image analysis, etc., can solve the problem that the shape modeling of industrial parts cannot adapt to various data environments, and shorten algorithm debugging. Time, strong adaptability and accuracy, simple model debugging effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
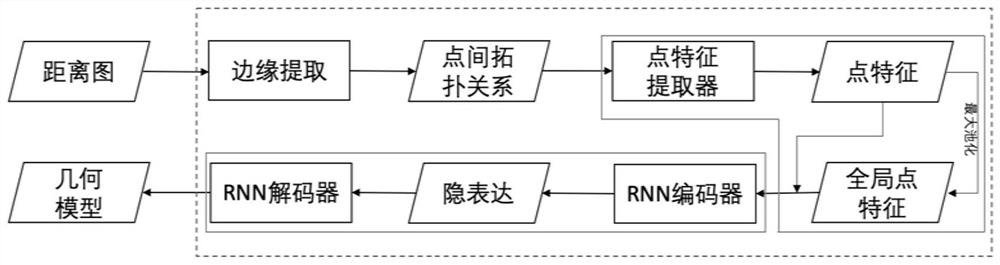
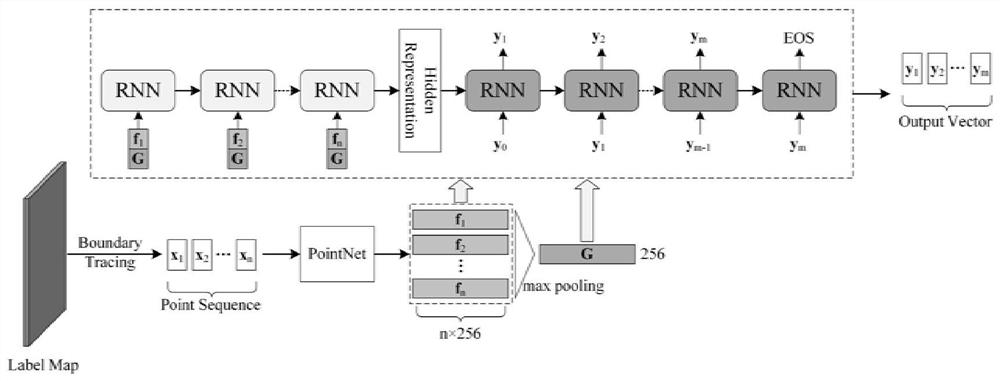
[0044] This embodiment provides an end-to-end high-precision shape modeling method for industrial parts. Such as figure 1 As shown, it mainly includes: S1: edge extraction, S2: building topological relationship between points, S3: point feature extraction, S4: point optimization. The four modules will be described separately below.
[0045] S1: Initial edge point extraction.
[0046] S1.1: Generate a depth map using the input point cloud.
[0047] S1.2: Mark the area of each part and its internal edge structure on the depth map as the ground truth for model training.
[0048] S1.3: Use Mask-RCNN on the depth map for target-level detection and semantic segmentation, and at the same time predict the distance between each pixel and its nearest edge point, referred to as the distance map.
[0049] S1.4: Obtain the area of each target detected by S1.3. In the distance map for this region, set pixel values less than 2 to 1, and to 0 otherwise. The result is the initial e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More