

Swarm robot mode generation and conversion method of multistage variable gene regulation and control network
A gene regulation network and swarm robot technology, applied in artificial life, instruments, computing models, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
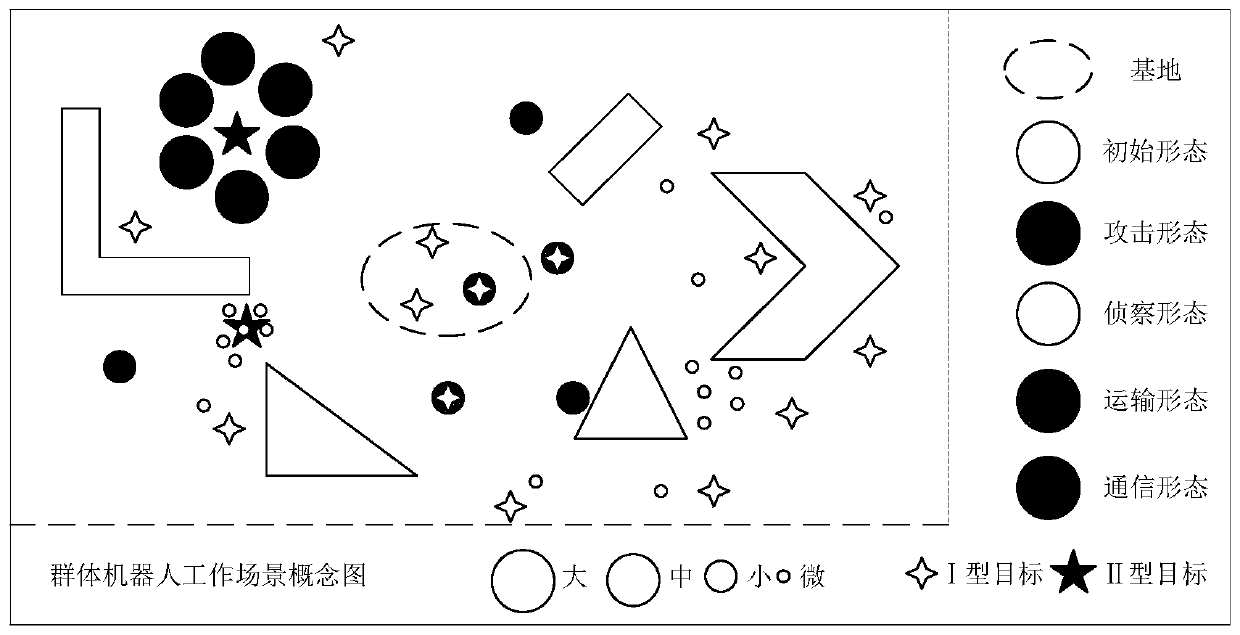
[0082] The present invention firstly designs a concept map of the working scene of group robots, such as figure 1 As shown, the dotted oval frame represents the base, and the unfilled solid line circle represents the initial form - "stem cell robot". The meaning of the icon is shown in the figure. In the conceptual scene, the "reconnaissance organization robot" has a small form and uses a wandering form to search the map. After encountering a type 1 target, it transforms into a small "transportation organization robot" and brings the type 1 target back to the base. After encountering a type 2 target, it will transform into a large "attack organization robot" and call for support. The medium form "communication organization robot" will send the information back to the base. After receiving the information, the base will broadcast the type 2 target globally. The nearest other organization robots respond to the task, move to the vicinity of the target and automatically transform ...
Embodiment 2
[0151] This embodiment verifies the feasibility, scalability and adaptability of the MLV-GRN model through simulation experiments. The simulation environment is set to a square area of 25mх25m, the base is located in the middle, and there are complex environments including convex polygons, concave polygons, and irregular narrow roads in the environment. Type 1 targets and type 2 targets are randomly distributed in the environment, and the robot starts from the base , the time step of a complete experiment is 300, the F designed by Example 1 1 , F 2 , F 3 And its total fitness function F, to analyze the performance of the group, so as to evaluate the performance of the model.
[0152] Regarding feasibility:
[0153] In order to verify the feasibility of the model, this embodiment selects 10 robots to form a group, 2 Type 2 targets and 4 Type 1 targets as task targets, and 5 different obstacles constitute a restricted environment. The robot moves at a constant speed of 2 m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More