

AUV multi-strategy navigation method based on submarine topography matching
A technology of terrain matching and navigation method, which is applied in the direction of navigation computing tools, sound wave reradiation, and measurement devices, etc., which can solve the problem of poor navigation ability in matching areas, inability to achieve high-precision underwater navigation, and unfavorable AUV task execution, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] In order to understand the above-mentioned purpose, features and advantages of the present invention more clearly, the present invention will be further described below in conjunction with the accompanying drawings and embodiments. Many specific details are set forth in the following description to facilitate a full understanding of the present invention. However, the present invention can also be implemented in other ways than those described here. Therefore, the present invention is not limited to the specific embodiments disclosed below.
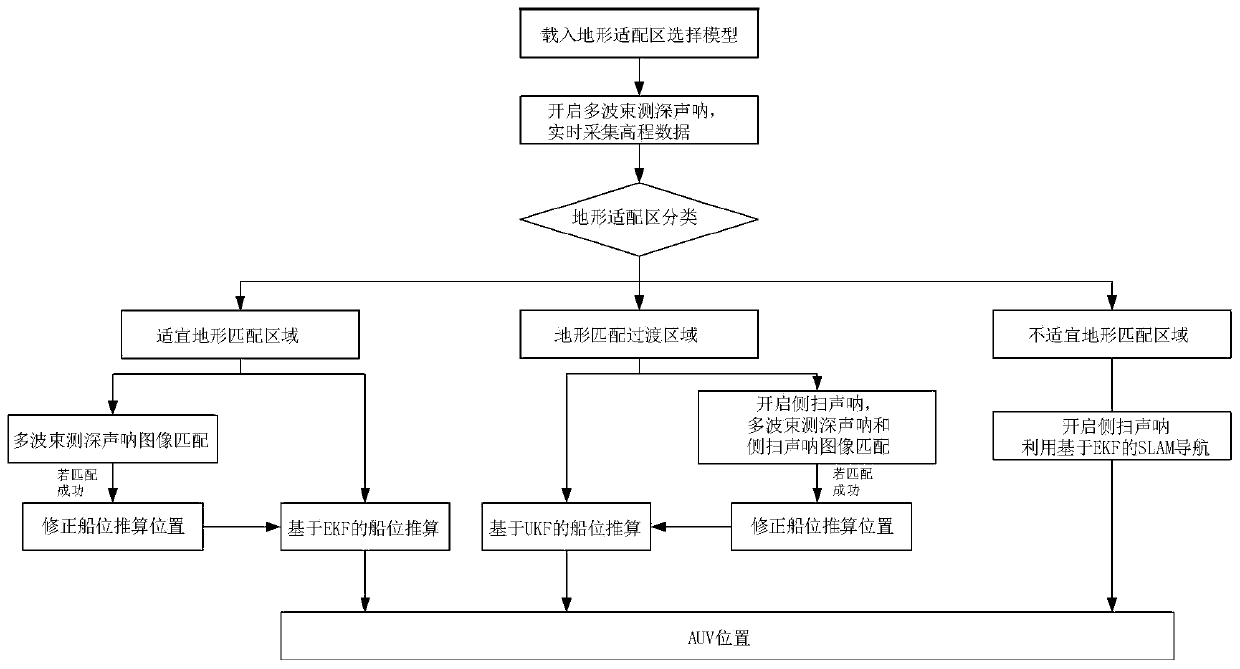
[0069] This embodiment proposes an AUV multi-strategy navigation method based on seabed terrain matching, such as figure 1 shown, including the following steps:
[0070] Step 1. Build a selection model for terrain adaptation areas. The classification of terrain adaptation areas includes suitable terrain matching areas, terrain matching transition areas, and unsuitable terrain matching areas;
[0071] Step 11, collect the model tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More