

a mechanical arm
A technology of mechanical arms and support arms, which is applied in the field of manipulators, can solve the problems of low adsorption and fit, weak point of force on arc-shaped cylinders, and sliding of cylinders, etc., and achieve the effect of firmness of cylindrical objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
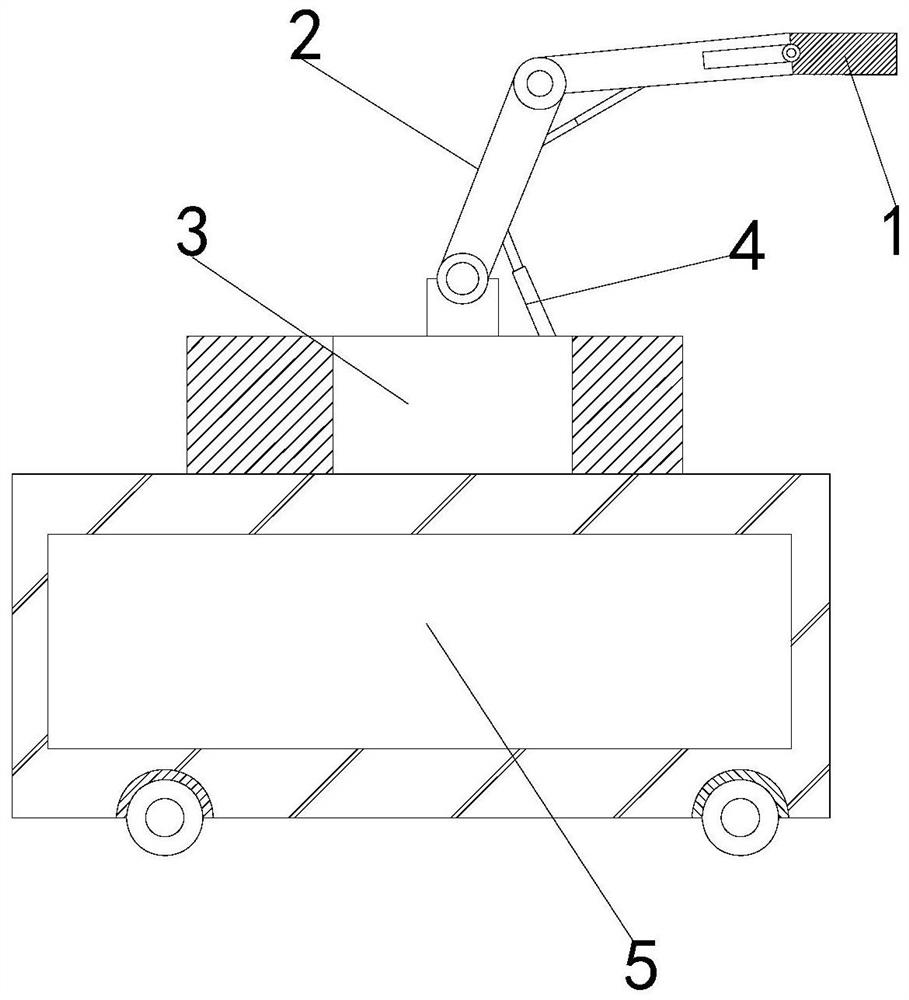
[0023] Such as Figure 1-Figure 4 Shown:
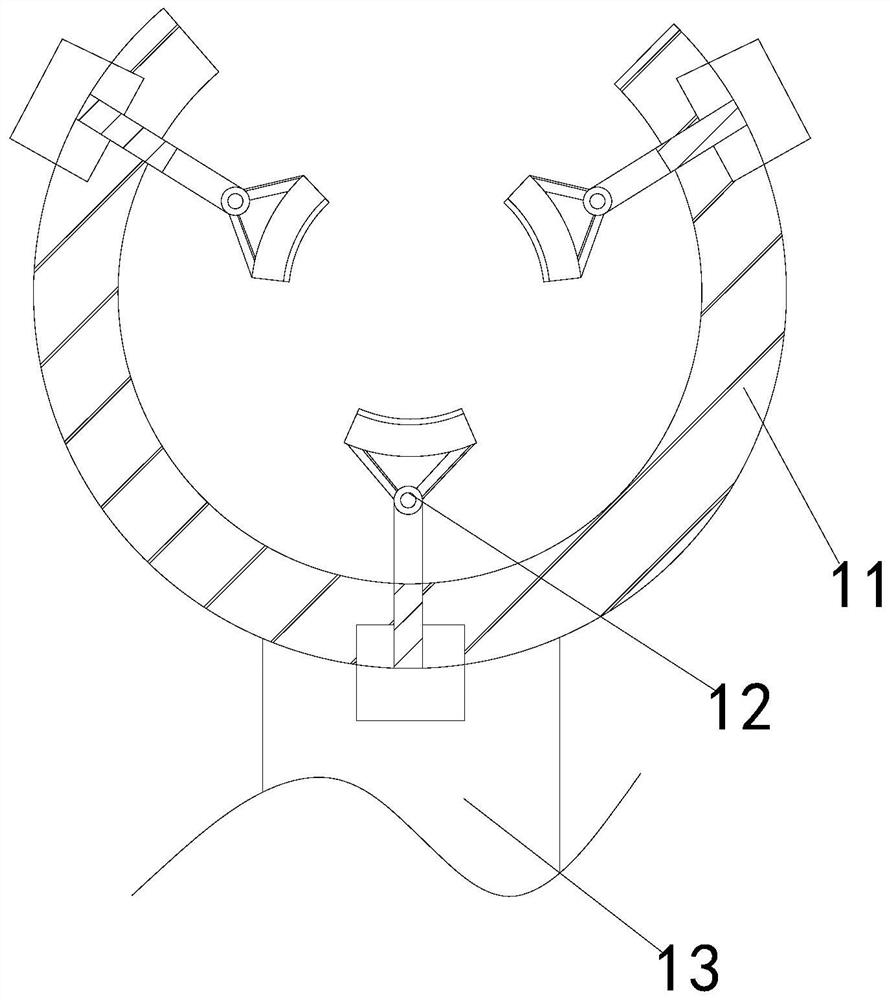
[0024] A kind of mechanical arm of the present invention, its structure comprises gripper 1, support arm 2, swing cylinder 3, telescoping rod 4, fixed platform 5, described support arm 2 is hingedly connected with gripper 1, and described support arm 2 is fixed on the swing Above the cylinder 3, the swing cylinder 3 and the fixed table 5 are an integrated structure, the telescopic rod 4 is located above the swing cylinder 3, and the gripper 1 is provided with a connecting rod 11, a fixing mechanism 12, and a force rod 13. The fixing mechanism 12 is installed on the upper end of the connecting rod 11, and the connecting rod 11 is welded on the upper end of the force-bearing rod 13. The fixing mechanism 12 is circularly distributed on the connecting rod 11, and is in the shape of an isosceles triangle, which has a more stable effect, making Cylindrical objects hold better.
[0025] Wherein, the fixed mechanism 12 is provided with a fo...
Embodiment 2
[0030] Such as Figure 5-Figure 7 Shown:
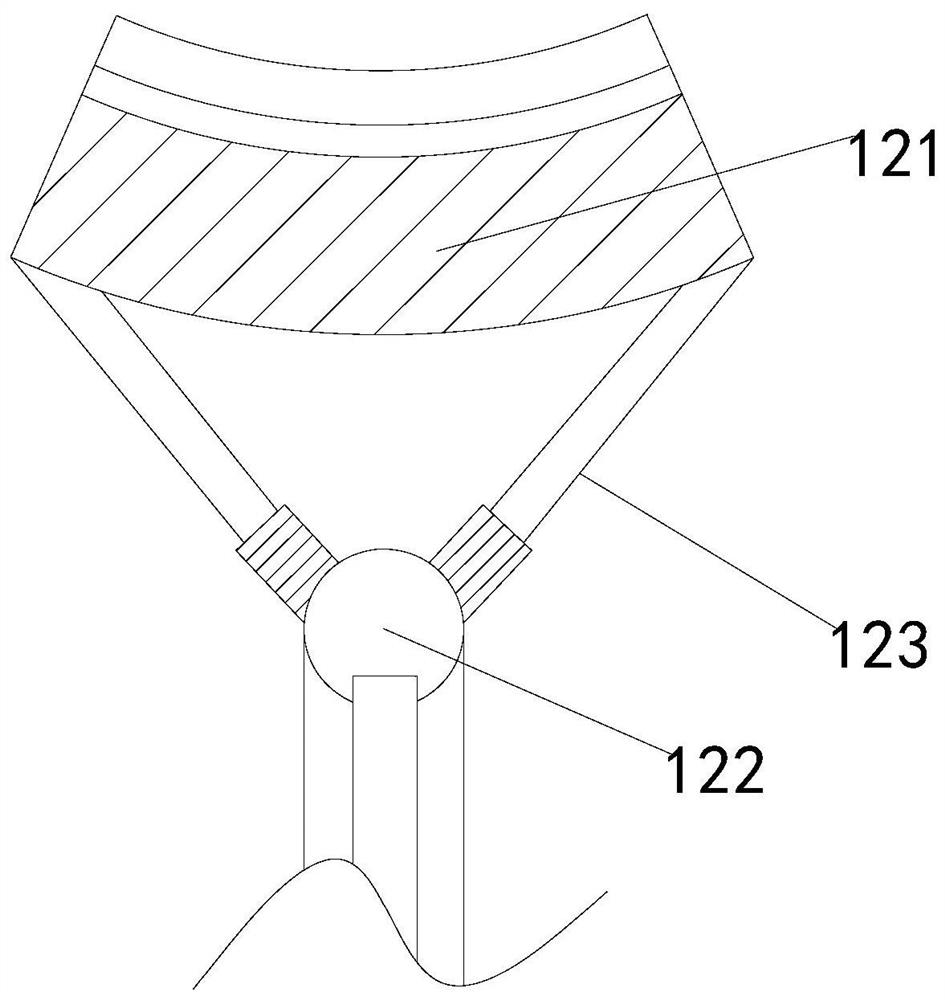
[0031] Wherein, the stressed mechanism 121 is provided with a pressure block b1, a stressed block b2, a pressure rod b3, a connecting block b4, and an elastic groove b5, the pressure block b1 is welded on the upper end of the stressed block b2, and the pressure rod b3 is installed inside the connection block b4, there are two connection blocks, and they are symmetrically distributed at the left and right ends of the elastic groove, and there are two pressure rods, which are symmetrically distributed through the force block, and the pressure rod b3 makes the effect The force is concentrated on the upper end of the force block b2.
[0032] Wherein, the pressure block b 1 is provided with a compression mechanism b 11 and a connection plate b 12, the compression mechanism b 11 is attached above the connection plate b 12, the connection plate is made of rubber material, and its surface shape is rough, with a The role of high friction can...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More