

Three-dimensional Formation and Obstacle Avoidance Method of Underwater Robots
An underwater robot, three-dimensional technology, applied in the direction of instruments, control/regulation systems, vehicle position/route/height control, etc., can solve problems such as poor flexibility, difficult system design, accumulation of formation errors, etc., and achieve the effect of reasonable strategy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
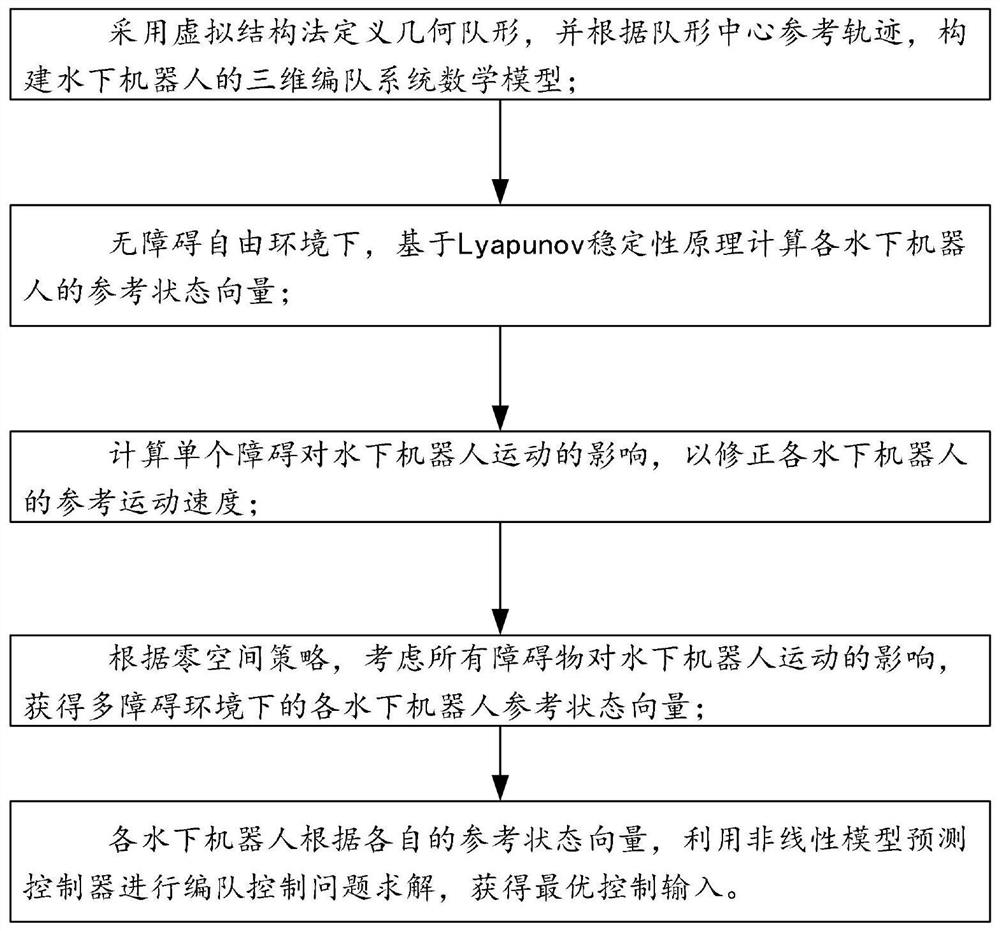
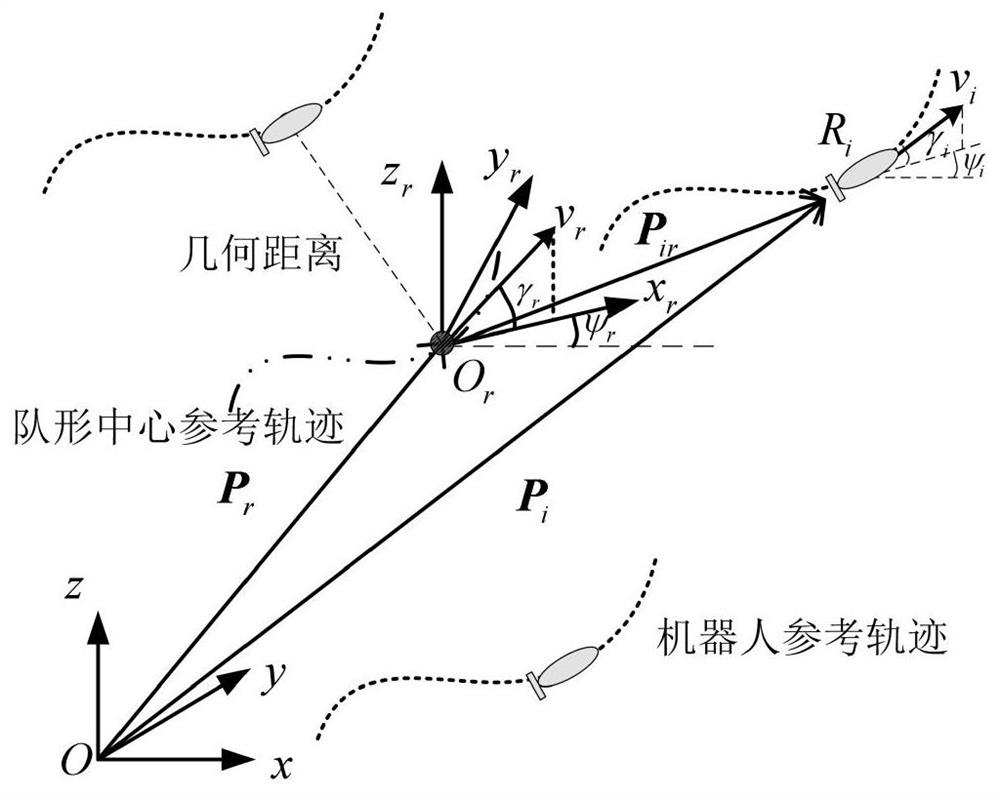
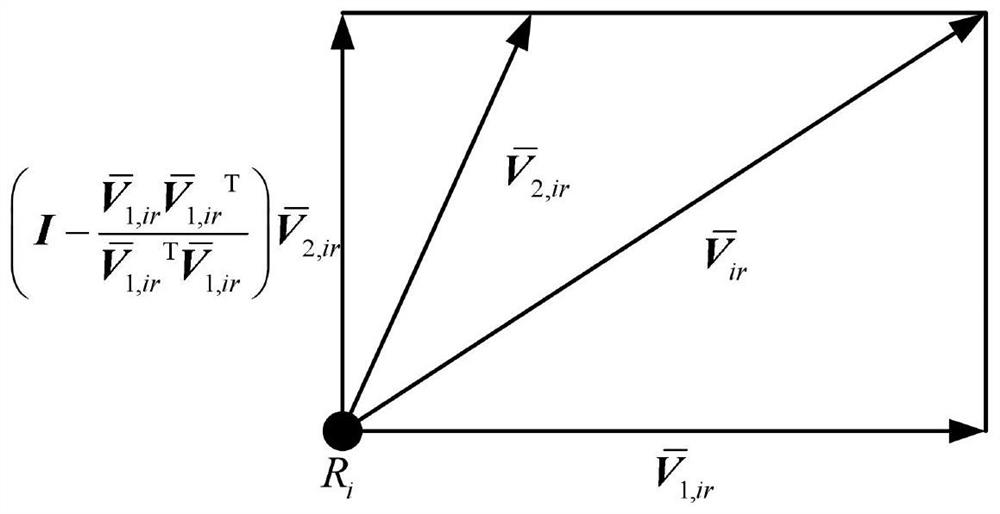
[0067] Hereinafter, specific embodiments of the present invention will be further described in conjunction with the accompanying drawings.
[0068] Since underwater robots often encounter various sudden obstacles or threats when navigating in formation in a three-dimensional complex environment, it is also required that underwater robots can safely avoid obstacles and avoid collisions between robots. The above constraints greatly increase the complexity of the formation problem, and the model predictive control method can flexibly handle various constraints and has high robustness. Therefore, the present invention considers combining the model predictive control with the virtual structure method. Since the model predictive controller can stably track the reference state vector, how to define a reasonable reference state vector according to the requirements of formation and obstacle avoidance is the key to the problem. For formation requirements, the present invention considers...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More