

Part characteristic robot quick visual positioning method based on standard spherical array
A technology for parts features and visual positioning, applied in instruments, measuring devices, optical devices, etc., to achieve accurate positioning, simple and flexible methods, and a wide range of applications
Image

Examples
Embodiment Construction
[0037] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
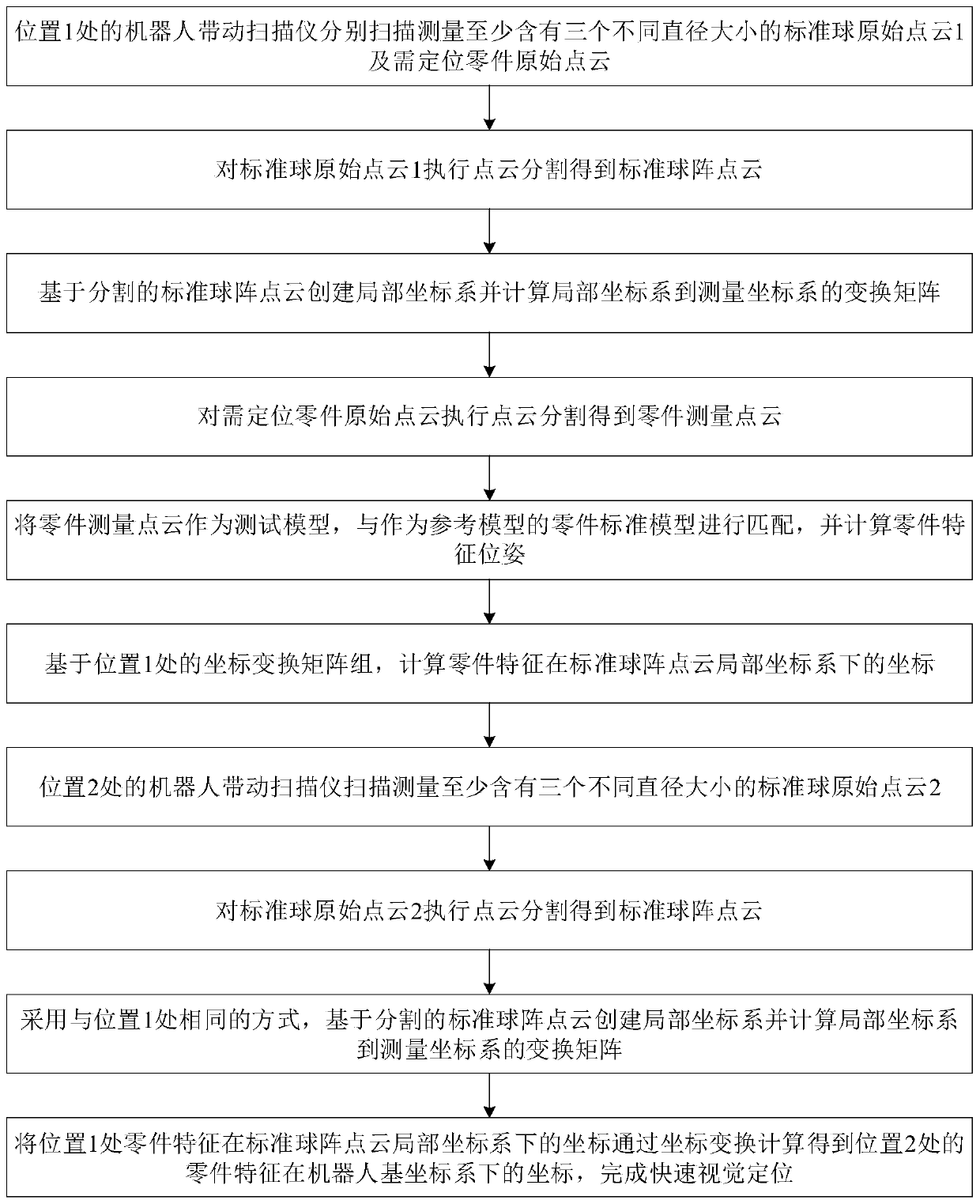
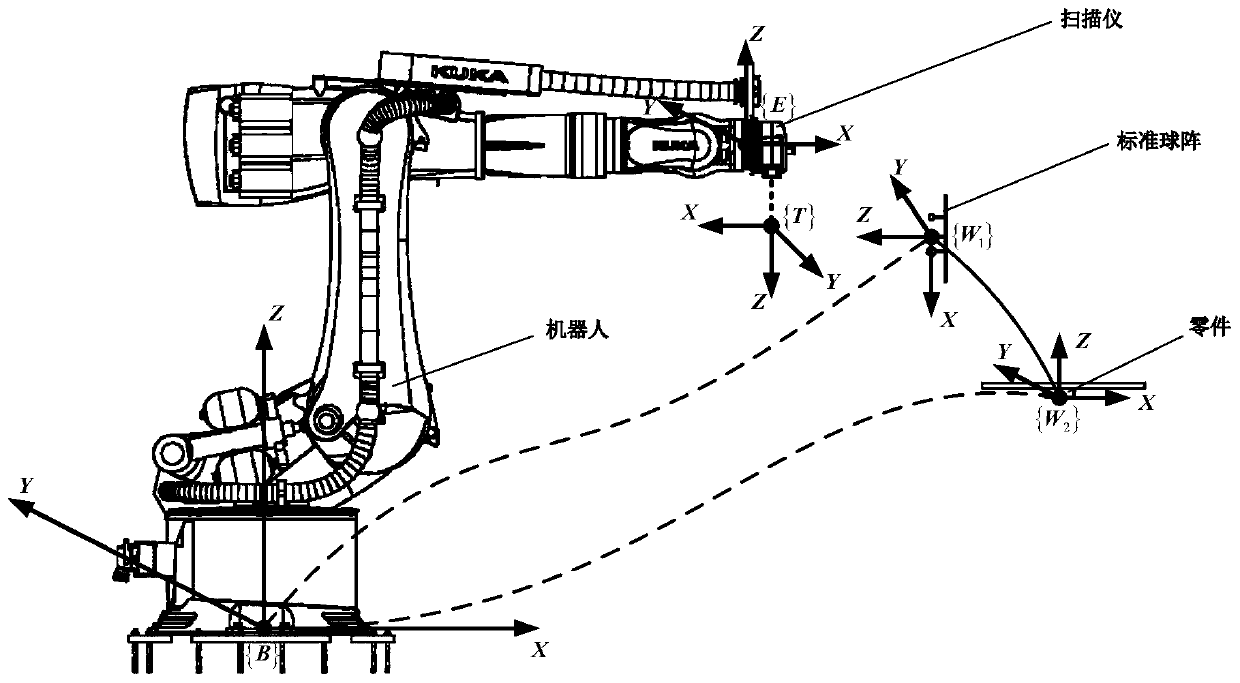
[0038] see figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 and Figure 6 , the present invention provides a method for quickly visually locating part features based on standard ball arrays. The method is suitable for fast positioning of most part features. It adopts robot three-dimensional measurement technology and performs part features based on environment-friendly standard ball ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
- IPC
- G01B11/00
- CPC
- G01B11/002
- Inventors
- 李文龙; 田亚明