A control method and device for AC-D axis decoupling of permanent magnet synchronous motor
A technology of permanent magnet synchronous motor and control method, which is applied in the direction of motor generator control, control of electromechanical transmission, electronic commutation motor control, etc. Realize problems such as complete decoupling control of current loop, and achieve the effect of reducing parameter information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0059] see Figure 1-5 .
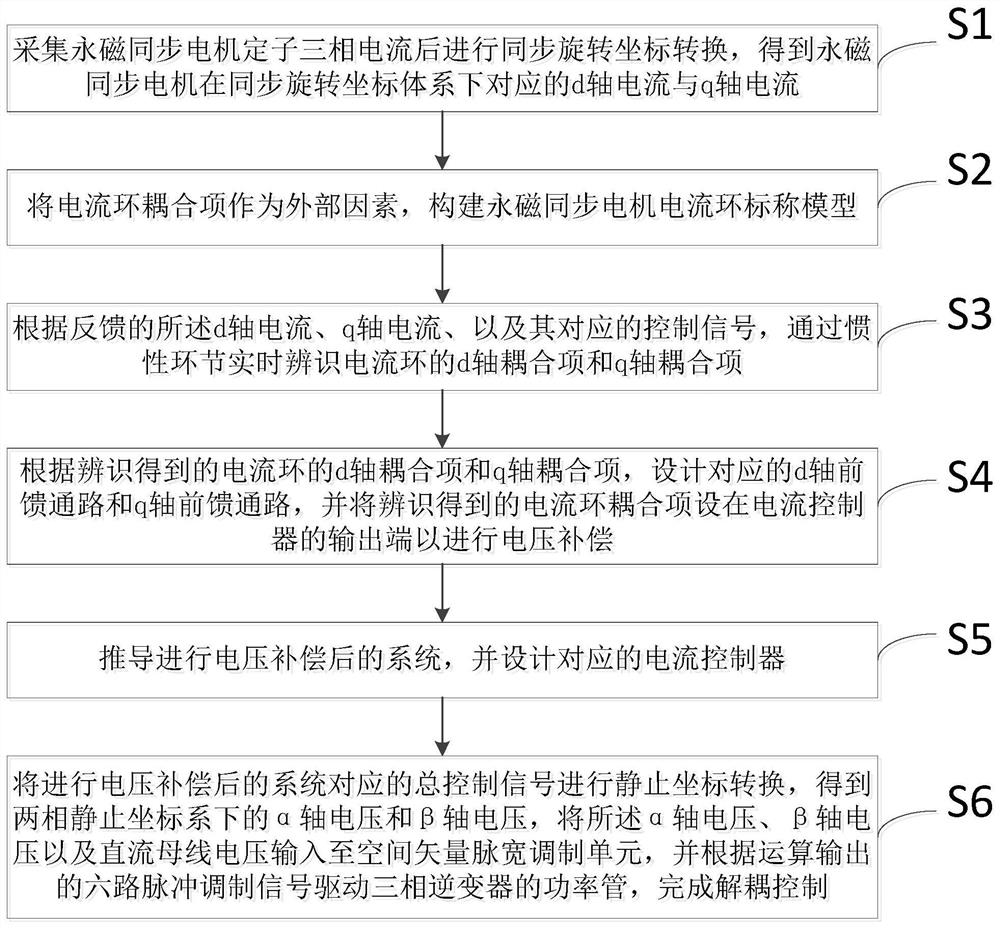
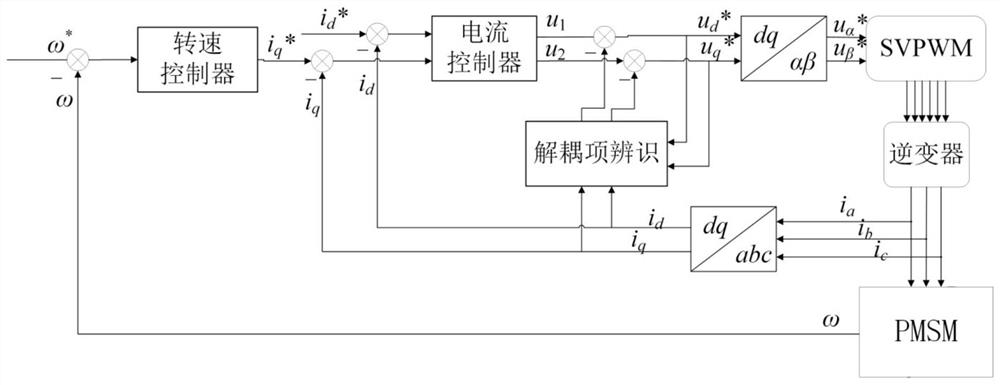
[0060] Such as figure 1 As shown, this embodiment provides a control method for AC-D axis decoupling of a permanent magnet synchronous motor, which at least includes the following steps:
[0061] S1. After collecting the stator three-phase current of the permanent magnet synchronous motor, the synchronous rotation coordinate conversion is performed to obtain the corresponding d-axis current and q-axis current of the permanent magnet synchronous motor in the synchronous rotation coordinate system.
[0062] In a preferred embodiment, for step S1, the synchronous rotation coordinate conversion specifically includes: performing synchronous rotation coordinate conversion on the stator three-phase current of the permanent magnet synchronous motor according to the synchronous rotation coordinate conversion formula to obtain the permanent magnet synchronous motor at The corresponding d-axis current and q-axis current in the synchronous rotating coordinate ...
no. 2 example
[0119] see Figure 6 .
[0120] Such as Figure 6 As shown, this embodiment provides a control device for AC-D axis decoupling of permanent magnet synchronous motors, including:
[0121] The current collection module 100 is used to collect the stator three-phase current of the permanent magnet synchronous motor and perform synchronous rotation coordinate conversion to obtain the corresponding d-axis current and q-axis current of the permanent magnet synchronous motor in the synchronous rotation coordinate system;
[0122] The current loop nominal model module 200 is used to use the current loop coupling item as an external factor to construct a permanent magnet synchronous motor current loop nominal model;
[0123] The current loop coupling item module 300 is used to identify the d-axis coupling item and the q-axis coupling item of the current loop in real time through the inertial link according to the fed-back d-axis current, q-axis current, and their corresponding control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More